Harbor Surveying with a bathymetric LiDAR System

Challenge
Scandinavian Drone’s challenge was to showcase the YellowScan Navigator‘s performance in the murky, dark waters typical of Scandinavia. To address these concerns, Scandinavian Drone needed to show that the Navigator could accurately capture underwater features and sediment deposits, even in challenging conditions.

The YellowScan Navigator mounted on the Hexadrone Tundra

Using the Secchi disk to evaluate water clarity
Solution
After the launch of the Navigator, they quickly arranged a demo event in Sweden, selecting a harbor with a river mouth as their primary testing site. This area, which undergoes annual dredging due to sediment accumulation, was an ideal location to showcase the Navigator’s capabilities. Additionally, they scanned several other harbor areas with various hydrographic conditions to gather diverse datasets.
One key aspect of the demo was assessing water conditions, as they are crucial for getting accurate returns. During winter, water clarity was relatively good, although there were challenges like sediment-laden river mouths.
The objectives were to:
- Showcase the complete workflow of the YellowScan Navigator LiDAR system.
- Assess the system’s realistic capabilities in specific conditions.
- Compare the benefits and drawbacks of using the Navigator versus echosounders and multibeam systems.
- Evaluate the efficiency and quality of data collection and post-processing.
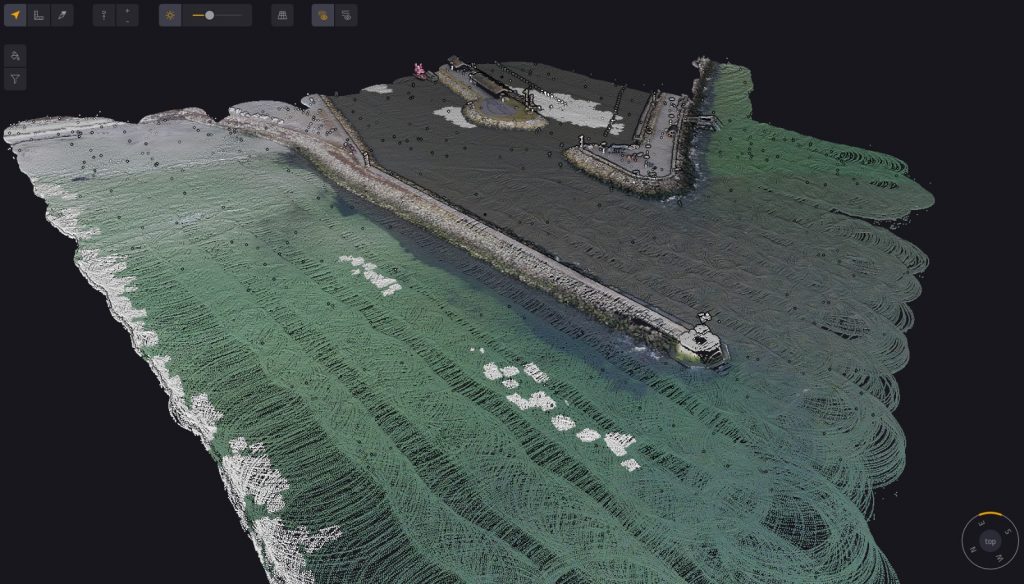
Colorized pointcloud of the harbor
Mission parameters
- Flight Altitude: 60 meters
- Flight Speed: 5 meters per second
- Flight Duration: 18 minutes (11 minutes of data collection)
- Coverage: Approximately 60,000 square meters per flight
The demos included flights over two harbors and additional test sites. The team emphasized achieving a 50% overlap for optimal data collection.

Pointcloud of a pier in Sweden
Equipment Used:
- YellowScan Navigator: For bathymetric data collection.
- Hexadrone Tundra 2: A flexible drone platform with a payload capacity of up to 5 kg, ideal for carrying the Navigator.
- UGCS Software: For precise mission planning and execution.
- YellowScan CloudStation software: For extracting and visualizing pointclouds
- Emlid Reach RS2: Used as a base station for accurate georeferencing.
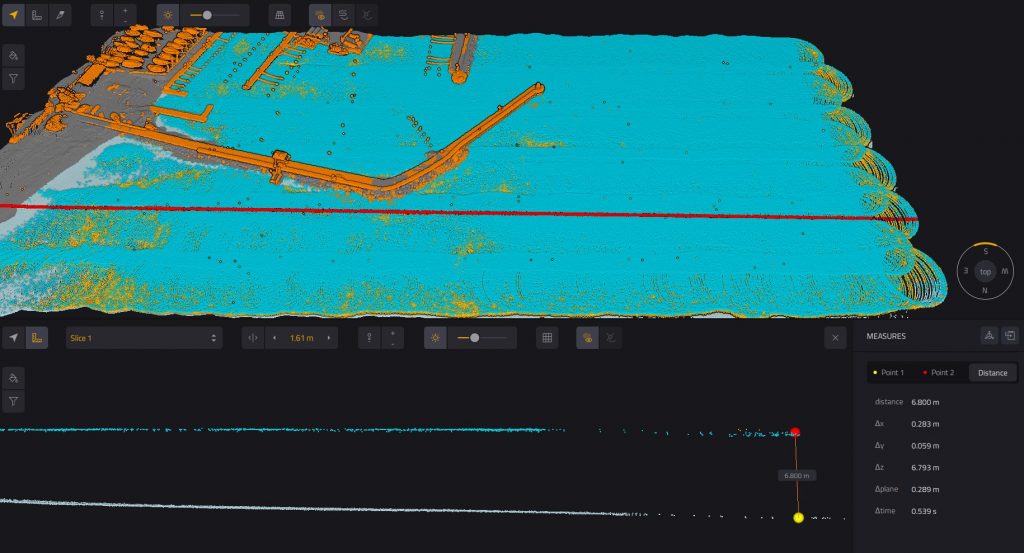
Pointcloud of the harbor showing the water depth measurement of about 7 meters
Results
Point Cloud Density: Estimated at 15-20 points per square meter
The Navigator system exceeded expectations by efficiently collecting bathymetric data over large areas. In one of their flights, they achieved a depth measurement of about 7 meters, which was impressive considering the conditions. They observed a clear representation of the seabed, with visible sandbars and other features. This data could be valuable for tracking changes over time and understanding underwater topography.
The detailed point clouds revealed comprehensive insights into underwater features, sediment deposits, and areas requiring dredging, proving the system’s superior data quality and visualization capabilities compared to traditional methods.
The demos were successful in showcasing the Navigator’s effectiveness and operational safety, and in demonstrating its ability to conduct detailed and accurate underwater surveys efficiently in diverse hydrographic conditions.
The Navigator represents a paradigm shift in bathymetric LiDAR technology. It makes advanced hydrographic surveying accessible and efficient, opening new possibilities for our customers.

Martin Andersson
CEO – Scandinavian Drone
