LiDARを使った3つの距離の求め方
Nov 24, 2020

LiDARセンサーは、1本または複数のレーザービームを使用して距離測定を行うものです。 設定した波長の放射線を照射し、戻ってきた信号を受信するアクティブセンサーである。 レーザー光の発光と受光から距離測定を求める手法には、主に三角測量、飛行時間、位相シフトの3つがある。
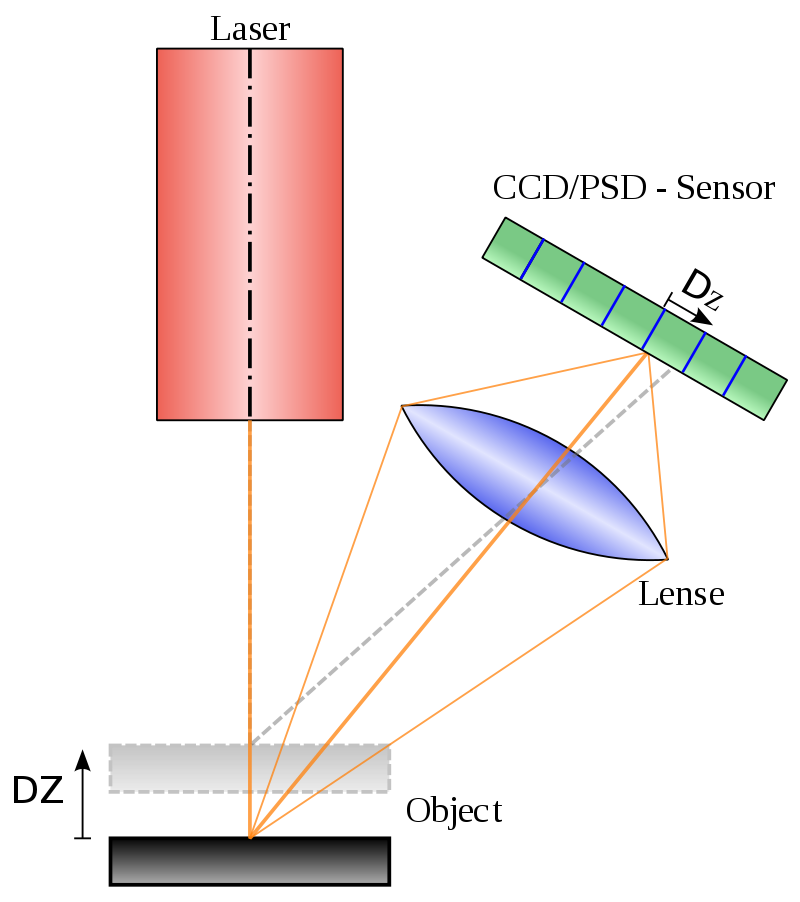
トライアングル測定システム
レーザー発信機と、その間に一定の角度で固定されたカメラで構成されています(図1)。 カメラとレーザー発信機の距離と方向は既知です。 レーザーは対象物にパターンを照射し、そのパターンをカメラ画像に可視化します。 表面までの距離によって、カメラの視野内の異なる位置に点が表示されます。 そして、三角法によって、レーザー光源と対象物との距離を求めることができるのです。 この技術は、主に近距離で動作するポータブル(ハンドヘルド)LiDARシステムに使用されています。
このタイプのシステムでは、測定誤差は測定対象物までの距離に直接関係します。 そのため、主に10m以下の限られた範囲で使用されることが多い。 この技術では、10マイクロメートルの範囲の精度を達成することができることに留意されたい。
Georg Wiora(Dr. Schorsch), レーザー三角測量センサーの原理, 2006年4月10日
飛行時間計測システム
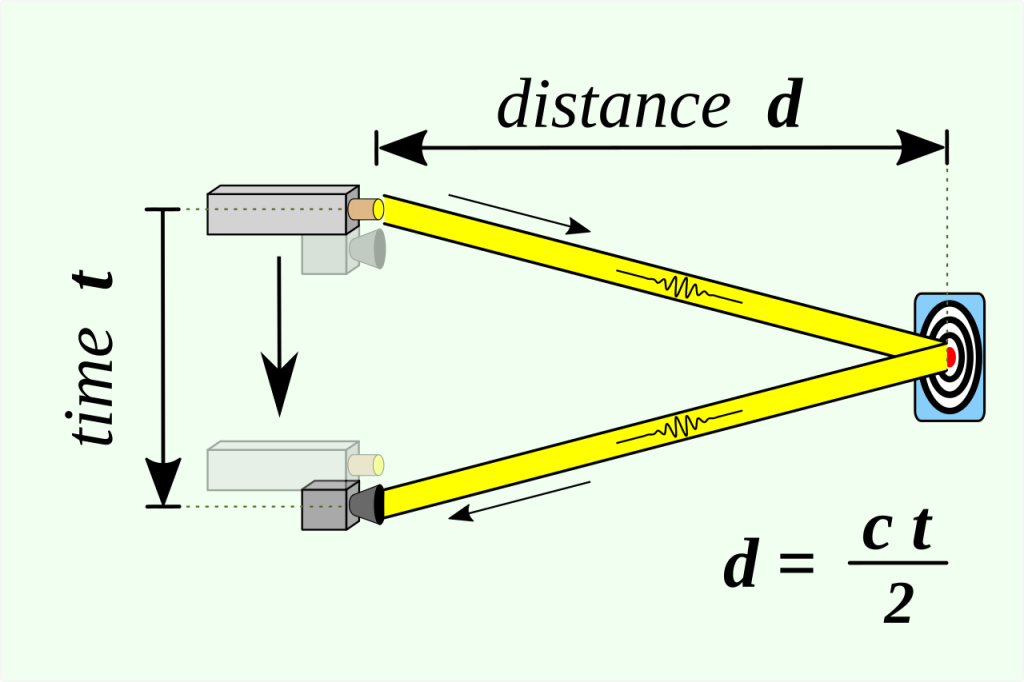
飛行時間(ToF)計測は、レーザーパルスが発振してからターゲットからの反射部分を検出するまでの移動時間に相当します。 媒質の屈折率を知り、光速を用いれば、光の進行距離を推測することができるのです(図2)。
ToFレーザーシステムの性能を制限するのは、取得速度です。 このようなシステムでは、次のレーザーパルスを発する前に、まず戻り信号を受信する必要があります。 しかし、ニーズに応じて、レーザーショットのレート(ポイント数)を上げることは可能ですが、その分、距離が短くなります。 宇宙、航空、車載用LiDARなど、長距離の距離計算に使用されます。 YellowScanのLiDARシステムもその一つです。
位相差測定装置
ToF方式に比べ、位相シフト方式は連続したレーザーを使用する必要があります。 それを(周波数の振幅で)変調することで、2本のビームの位相差を測定することができる。 LiDARシステムの出口でビームを分離する。 1つは直接検出器に向かうもので、もう1つはターゲットに向かい戻ってくるものです。
これらの測定システムは、一般的に飛行時間測定システムよりもデータ取得速度が速く、分解能が高く、ノイズが少なく、高精度である。 これらのシステムの限界は、使用される変調のタイプ(非周期的または周期的)に依存します。 この技術は、地上波や屋内のLiDARスキャナーのような中距離システムで見られます。
N.B. 著者 Léa Moussy – この記事の内容は、著作権によって保護されています。