LiDAR点群の基礎

この記事では、LiDAR点群とは何か、どのように使用されるのかを説明します。 点群がどのように収集されるのか、点群の内部にはどのようなデータが保存されているのか、点群をどのように視覚化するのかについて学びます。 最後に、点群データがどのように管理され、どのように処理され、さまざまな用途に利用できるかを学びます。
LiDAR点群の定義
センサーによって生成された点の集まりである。 このようなコレクションは非常に密度が高く、数十億のポイントを含むことができるため、エリアの非常に詳細な3D表現を作成することができる。 環境モニタリング、地図作成、都市計画、インフラモニタリングなどの用途で使用されている。
点群は点群の一種で、レーザーパルスを使用してオブジェクトまでの距離を測定し、環境の3D表現を作成するために生成される。 これらのレーザーパルスは、LiDAR装置(3Dレーザースキャナーとしても知られている)から発信される。 LiDARがどのように機能するかについては、こちらの記事を参照されたい。 LiDARスキャナーの仕組みについては、こちらの記事をご覧ください。
このほか、写真測量、ソナー、レーダーなど、さまざまな技術や方法で生成される点群もある。

点群は、地形図作成アプリケーションに使用される。 (出典:www.pexels.com)
LiDAR点群の利点
さまざまな業種に複数のメリットを提供する:
- オブジェクトや構造物が環境内のどこにあるかを正確に表示する。 このような高精度の3Dデータは、測量、マッピング、エンジニアリングのアプリケーションに必要である。
- データは3Dでキャプチャされるため、デジタルツインの作成など、調査された環境の3Dビジュアライゼーションや分析を容易にすることができる。
- これらの情報には豊富な幾何学的情報が含まれており、地形、インフラ、自然の特徴の詳細な解析やモデリングが容易になります。
- 建物、道路、インフラなどの特徴を識別し、分類できるように、自動化されたオブジェクト認識と分類を可能にする。
LiDAR技術のユニークな特徴は、1つのレーザーパルスがその経路上で複数の表面に遭遇し、相互作用するときに、複数のリターンを持つことができることである。 検出の順序に基づいて、LiDARシステムは異なるタイプのリターンを区別することができる。
このような複数のリターンは、林業、植生マッピング、地形モデリングなどの用途に関連する、調査された環境の構造、構成、地形に関する貴重な情報を提供する。

点群は林業アプリケーションに関連する情報を提供する。 (出典:www.pexels.com)
LiDARポイントにはどのような情報が保存されていますか?
点群データは、さまざまなアプリケーションに貴重な位置データを提供する。 その人気と利点をよりよく理解するために、そのデータについて少し説明しよう。 次に、さまざまな用途に役立つ3D製品に変換される前に、それらがどのようにキャプチャされ、保存され、処理され、視覚化されるかについて説明する。
点群に含まれる個々の点には、3D座標(X、Y、Z)などの情報が含まれるが、それだけでなく、座標とともに、レーザーの戻り信号の強度も取得される。 これは、物体の密度や物質組成をより詳しく教えてくれる貴重な情報である。
スキャンに分類スキームが使用されている場合、異なるオブジェクトや特性を表す個々の分類ラベルに基づいて、個々のポイントを異なるクラスにグループ化することが可能です。 以下は、地面や地表を表す1つのクラス(茶色で表示)に属する点群内の個々の点をすべて表示し、それ以外の点はグレーで表示した例です。
さらに、個々のポイントは、リターン番号、スキャン角度、スキャン方向、ポイント密度、RGBカラー値、タイムスタンプなどの追加属性を含むことができる。 前の画像と同じデータで、今回はRGB値をメインのシンボロジークラスとして使用した例である:
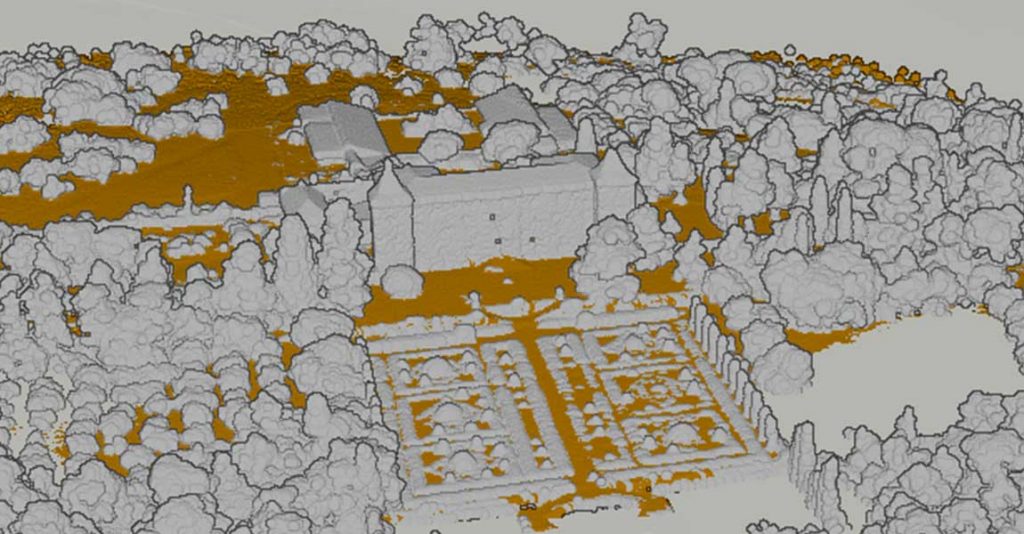
地上」クラスの分類を用いた点群の可視化
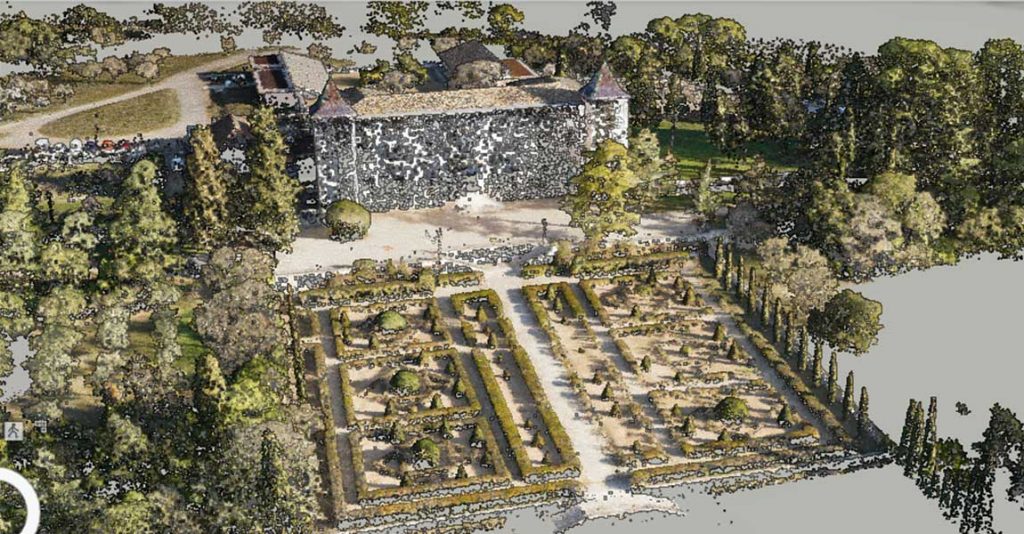
RGB値をメインシンボロジークラスとして使用したLiDAR点群の視覚化
さまざまなタイプのLiDARスキャンシステム
では、どのように捕獲するかに注目してみよう。 点群を生成するためのLiDARスキャンシステムにはさまざまなタイプがある。 通常、空中スキャンと地上スキャンは区別される:
- エアボーン・レーザー・スキャニングは、有人飛行機を使って高所から広い範囲をマッピングするのに対し、ドローンを使ったシステムは地上に近い小さな範囲をキャプチャする。 ドローンを使ったLiDARについては、こちらの記事で詳しく解説している。
- テレストリアルレーザースキャニングは、エリアをキャプチャするために静的なレーザースキャナーを配備し、モバイルスキャニングは、3Dポイントクラウドをキャプチャしながらスキャン装置を移動させることによって、より広いエリアをキャプチャするために移動装置(車や電車など)を使用します。
これらの異なるタイプのスキャンシステムは、異なる用途に使用される。 しかし、データを生成するプロセスはそれぞれ似ている。 これについては次に説明する。

YellowScan Navigator LiDARシステムをHexadrone Tundra UAVに搭載
LiDAR点群の生成方法
飛行時間型LiDARスキャナーは、大量のレーザーパルスを放出するセンサーを備えている。 レーザーパルスが環境中の物体や表面にぶつかると、さまざまな方向に反射する。 反射されたレーザーパルスはセンサーによって検出され、センサーは光速と各パルスがセンサーに戻ってくるまでの時間を用いて、センサーとパルスを反射した物体との間の距離を計算する。
次に、測定された距離を使って各点の3D座標を計算する。 1つの点群とは、スキャンエリア内のオブジェクトの形状と空間分布を表すすべての個々の点の集まりである。 移動するスキャニング・プラットフォームの場合、搭載されたGNSSと慣性計測ユニット(IMU)システムが、スキャニング・プラットフォームの位置と姿勢を追跡するための追加情報を記録する。 これは、キャプチャしたデータを直接ジオリファレンスするために必要である。
静的な地上型レーザースキャナーを使用して環境をスキャンする場合、大きな物体や構造物をキャプチャするために、異なる位置や視点から複数のスキャンが必要になることがある。 1つの点群データセットには、異なる視点からの複数のスキャンが含まれることがある。 これらはすべて、単一の空間参照系を使用することで、単一の点群として可視化することができる。
LiDAR点群ファイルフォーマット
LAS、LAZ、E57など、さまざまなファイル形式で保存できる。 LASはデータを保存するために最も広く使われているフォーマットのひとつで、LAZはLASフォーマットの圧縮バージョンである。 これにより、データの正確性を保ちながら、ファイルサイズを大幅に削減することができる。 E57は、点群データを含む3D画像データを保存するためのベンダーニュートラルなファイルフォーマットです。 点群は、ローカル、ネットワーク上、またはクラウド上に保存することができる。
点群を視覚化するさまざまな方法
空間内の3D点と、その点が何を表しているかについての追加データが含まれていることは見てきた。 次に、GIS、ビジュアライゼーション・ソフトウェア、3DモデリングやCADソフトウェアなどの専門的なソフトウェア・ツールを使って、それらを視覚化することができる。 ソフトウェアベースのソリューションに加え、ウェブベースのアプリケーションを通じてウェブブラウザで直接可視化したり、AR/VR技術を使ってユーザーが3D環境に没入し、データと対話したりすることもできる。
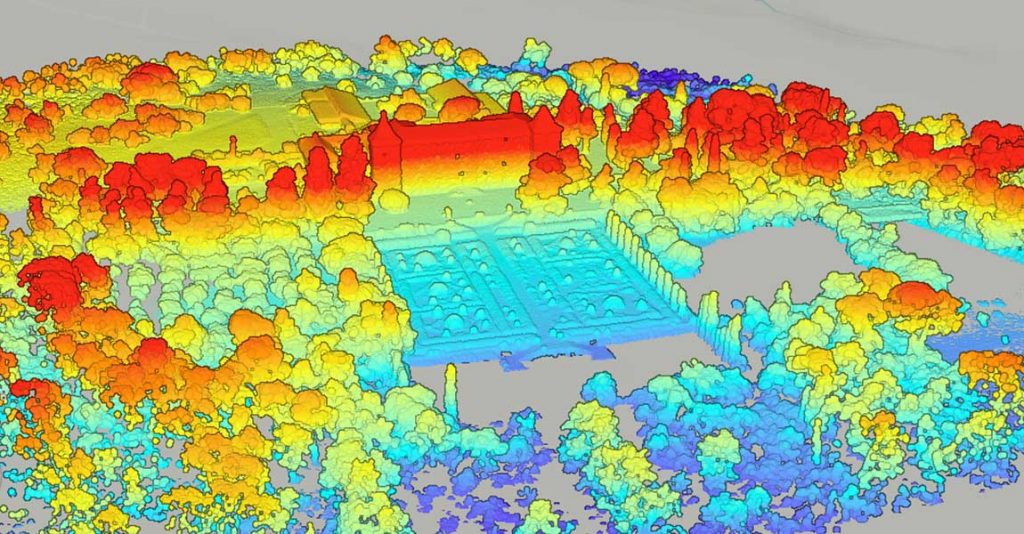
標高値に基づいてArcGIS Proで可視化されたLASファイル(データソース:YellowScan)
さらなるデータ管理業務のための専用ソフトウェア
検査目的であれば点群を視覚化すれば十分かもしれないが、データ処理、フィルタリング、セグメンテーション、分析、特徴抽出など、生データに対してさまざまなタスクを実行するには、専用のソフトウェアが必要になる。 これらは、生の点群に対してしばしば実行される作業の一部である:
- 品質、精度、使いやすさを向上させるための後処理を行う。 これには、ノイズや異常値の除去、フィルタリング、異なるオブジェクトクラスやカテゴリへのポイントの分類などが含まれる。
- 点群データを他のデータソースと組み合わせることで、分析および可視化のためのデータを充実させる。
- 物体認識アルゴリズムを使用した点群内の関連する特徴の抽出。
さまざまな産業用途向けにさまざまな3D製品を生成するには、これらのステップやその他のステップが必要である。 このような点群由来の製品には、3D都市モデル、DEM/DSM、等高線、断面図、ブレークラインなどがある。
データ処理ワークフロー全体の合理化
YellowScan CloudStationは、YellowScanのUAV LiDARシステムで取得したデータを処理、視覚化、共有するための包括的なプラットフォームを提供するソフトウェアソリューションです。 データのインポート、処理から可視化、分析までのデータ処理ワークフローを合理化することで、ユーザーはUAV LiDAR調査データから実用的な洞察を引き出し、情報に基づいた意思決定を行うことができる。
主な機能には、自動データ処理、特徴抽出、分類がある。 さらにCloudStationは、関係者間のコラボレーションとデータ共有を促進する。 また、LASファイルのエクスポートも可能で、さらなる分析、視覚化、既存のワークフローへの統合のために、データや派生製品をシームレスに転送することができる。
CloudStationには3種類のバンドルがある:
- 必要不可欠:オルソフォトを視覚化、検査、カラー化し、データをエクスポートします。
- プロ可視化、検査、データ品質の向上、分類と色付けによるデータの充実、さらに多くのエクスポート機能のロックを解除します。
- 究極:妥協ゼロ、すべての機能を有効化。 オルソフォト生成、自動化とバッチ処理のためのコマンドライン(ytk)を含む。

YellowScan CloudStation LiDAR処理ソフトウェアのスクリーンショット
よくある質問
LiDARの点群にはいくつのポイントが含まれますか?
1つのポイントに含まれるポイントクラウドの量は、ポイントの密度、精度、データセット内のポイントの分布など、多くの要因に依存します。 データセットあたりのポイントの総量は、数十億ポイントから数十万ポイントまで様々である。
LiDAR点群の一般的な面積は?
エリアサイズは決まっていない。 これもまた、航空機やドローンベースのシステムの場合の飛行高度、センサーの仕様や点密度など、複数の要因に左右される。 ドローンベースのLiDARを使えば小さなエリアを、空中マッピングシステムを使えば大きなエリアをスキャンすることが可能だ。
LiDARの点群はどこで使用されるのか?
一般的な用途としては、林業管理、考古学研究、地質調査、地形図作成、インフラストラクチャー・モデリング、都市計画・開発などがある。
LiDAR点群のファイルサイズは?
ファイルサイズは、選択したファイルタイプ、調査エリア、ポイント密度、ポイントクラウド内の各ポイントに関連する数と複雑さによって異なります。 これらの要因によって、一つのファイルは数メガバイトから数テラバイトに及ぶ。