水深測定LiDARシステムによる港湾測量
Sep 05, 2024





スカンジナビアン・ドローンの課題は、スカンジナビアの典型的な濁った暗い海域でイエロースキャン・ナビゲーターの性能を示すことでした。 これらの懸念に対処するため、スカンジナビアン・ドローンは、Navigatorが厳しい条件下でも水中の特徴や堆積物を正確に捉えることができることを示す必要がありました。
ヘキサドローン・ツンドラに取り付けられたYellowScan Navigator
セッキディスクを使った水の透明度の評価
Navigatorの発売後、彼らはすぐにスウェーデンでのデモ・イベントを手配し、河口のある港を主要なテスト場所に選んだ。
土砂の堆積により毎年浚渫が行われるこの地域は、Navigatorの能力を紹介するのに理想的な場所だった。
さらに、多様なデータセットを収集するために、さまざまな水路条件の港湾区域をいくつかスキャンした。
デモの重要な側面のひとつは、正確なリターンを得るために不可欠な水の状態の評価だった。
冬の間、水の透明度は比較的良かったが、堆積物が多い河口などの課題もあった。
目的は以下の通りである:
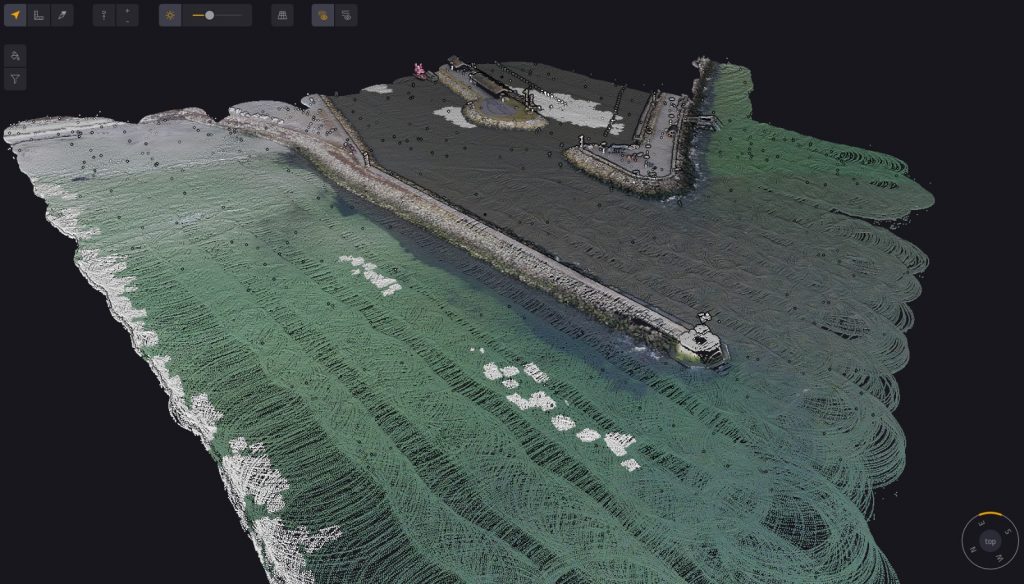
港のカラー点群
デモでは、2つの港と追加のテストサイトでの飛行が行われた。
チームは、最適なデータ収集のために50%のオーバーラップを達成することを強調した。
スウェーデンの桟橋の点群
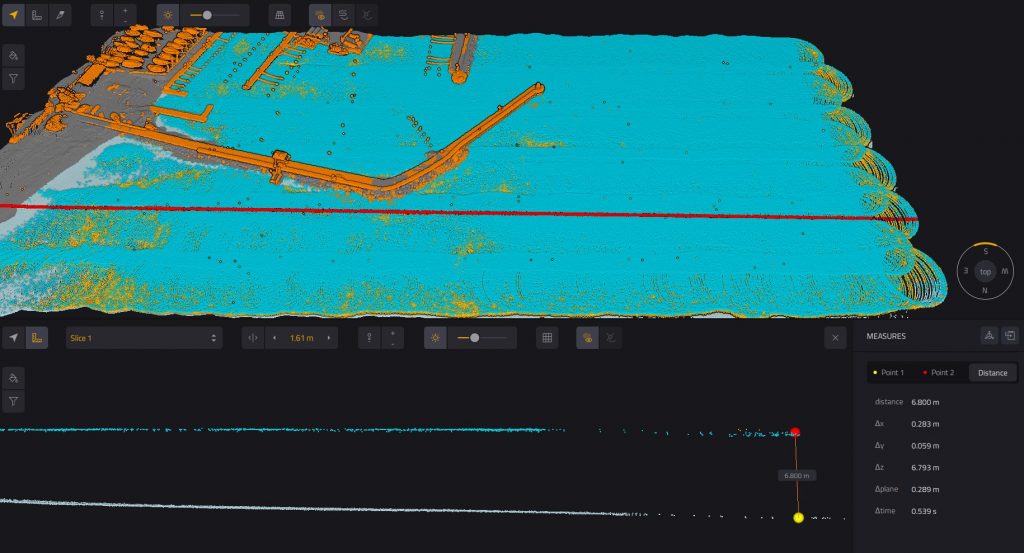
水深約7メートルを計測した港のポイントクラウド
点群密度:1平方メートルあたり15~20点と推定
ナビゲーター・システムは、広範囲にわたって効率的に水深データを収集し、期待以上の成果を上げた。
あるフライトでは、水深約7メートルの計測を達成したが、これは条件を考えれば素晴らしいことだった。
彼らは、砂州や他の特徴が見える海底の明確な表現を観察した。
このデータは、経年変化を追跡し、海底地形を理解する上で貴重なものとなるだろう。
詳細な点群データから、水中の特徴、堆積物、浚渫が必要な領域に関する包括的な洞察が明らかになり、従来の方法と比較して、このシステムの優れたデータ品質と可視化能力が証明された。
デモは、ナビゲーターの有効性と操作の安全性を示し、多様な水路条件下で詳細かつ正確な水中調査を効率的に実施する能力を実証することに成功した。
Navigatorは水深測定LiDAR技術のパラダイムシフトを象徴しています。
高度な水路測量を身近で効率的なものにし、お客様に新たな可能性をもたらします。
マーティン・アンデルソン
スカンジナビアン・ドローン社CEO
