LiDARスキャナーについて

LiDARスキャナーは、3D点群をキャプチャするために使用される。 しかし、どのように機能するのだろうか? LiDARスキャナーの動作原理を説明し、距離測定値がどのように変換され、3D点群に合成されるかを説明しています。 これらは、さまざまな産業用途に使用される多くの3Dマッピング製品の基礎となっている。
LiDARスキャナーの紹介
LiDAR技術は、過去25年間に大きな進歩を遂げたジオデータ取得技術である。 LiDARスキャナーは3D点群をキャプチャし、そこから他の3D製品が派生する。 これには、3D都市モデル、三角不規則ネットワーク(TIN)、3Dバーチャルランドスケープ、デジタル標高モデル(DEM)などが含まれます。 これらは、洪水防止、交通安全改善、環境分析など、多くの用途に使用されている。
LiDARスキャナーは、1回の測量で数百万点、数十億点の点群を日常的に取得する装置である。 LiDARスキャナーは「アクティブ」センサーで、レーザービームを照射し、対象物と人間が接触することなく対象物までの距離を測定する。「アクティブ」とは、センサー自体が電磁エネルギーを発することを意味する。 さまざまな分類とLiDARの位置づけについての詳細は、こちらの記事を参照。
LiDARスキャナーの主な種類
LiDARスキャナーには、主にエアボーン・スキャナーとテレストリアル・スキャナーの2種類がある。 エアボーンLiDARスキャナーは、航空機に搭載されたレーザー装置を使用し、レーザーパルスの往復移動時間を測定する。 ここ数年、UAVやドローンは3Dジオデータをキャプチャするための信頼性の高い技術であることが証明されている。 YellowScanはドローン用のLiDARシステムを専門としている。 UAVでのLiDARの使用については、こちらの記事を参照。
スタティック・グラウンド・ベースLiDARは、スキャニング・プロジェクトの間、固定された静止位置に留まるLiDARスキャナーを使用する。 スキャニング装置が地上を移動するプラットフォームを使用する場合、「モバイル・レーザー・スキャニング」という用語が使用される。
LiDARスキャナーとレーザースキャナーという用語はしばしば同じ意味で使われますが、両者には微妙な違いがあります:LiDARは、距離を測定するためのレーザー技術の使用を指すより広い用語であり、空中や地上のアプリケーションを含む様々な文脈で使用されています。 レーザースキャニング」という用語は、通常、地上装置を使用して、物体や環境の詳細な3D形状やジオメトリをキャプチャするプロセスを特に指すことが多い。 つまり、LiDARはレーザースキャニングよりも広い用語であり、「地上型LiDAR」とも呼ばれる。

空中LiDARスキャナー

地上型LiDARスキャナー
LiDARスキャナーのコンポーネント
LiDARスキャナーは、走査光学系、レーザーパルス発光器、受信機を組み合わせたものである。 エアボーン・レーザー・センサは、レーザー・パルス発光器と、レーザー・パルスを飛行経路全体に向け、分散させるための走査光学系、および受信器から構成される。 スキャニング・システムは、LiDARスキャナー、全地球航法衛星システム(GNSS)に基づく測位システム、慣性航法システム(INS)の3つのコンポーネントを組み合わせたものである。 INSは「慣性計測ユニット」(IMU)という名称でも知られており、基準系に関するセンサーの姿勢を決定することができる。
LiDARスキャナーのレーザー光源は、1秒間に多くのレーザーパルスを送信します。スキャニング光学系は、飛行経路(空中LiDARシステムの場合)を横切ってレーザーを誘導し、分配する役割を果たします。 テレストリアルレーザースキャニングでは、回転ミラーが規則正しく制御された方法でレーザービームをシーンに照射する。
LiDARスキャナーの動作原理
LiDARスキャナーのレーザーユニットは、高周波で個々のレーザーパルスまたはレーザービームを生成する。 シーンをキャプチャするためには、レーザービームを2つの方向に照射する必要がある。 地上レーザースキャニングの場合、これは通常、水平方向と垂直方向となる。 エアボーンLiDARは地上のLiDARと同様に機能するが、システムが空中を移動している間に外側の方位の複数のパラメータを決定しなければならないため、より要求が厳しい。 LiDARがどのように機能するかについては、こちらの記事を参照されたい。
LiDARスキャナーから照射されるレーザービームは、ビームが最初に出会う物体までの距離を測定する。 レンジとは別に、LiDARスキャナーは、レンジの垂直角と水平角を含む追加データを登録する。 3次元球座標は、レーザー走査装置の座標系に関連している。
球座標からレーザースキャナーに関連する3DデカルトX、Y、Z座標に移動するために複数の変換が適用され、最終的に複数の点群をジオリファレンスするための共通の座標系になる。 シーンを調査するには、通常、大きな対象物をカバーするために異なるセットアップ位置からのスキャンが必要になる。 点群処理ソフトウェアは、デジタル標高モデルの生成や、屋外や屋内のシーンの3Dモデル(3Dマップ)の作成を可能にする。
LiDARスキャナーの用途
LiDARスキャナーは、以下のような様々な産業で使用されている:
- 考古学:LiDARは、古代の建造物の復元、複雑なパターンの発見、大昔の文明に関する手がかりの発見に使用されている;
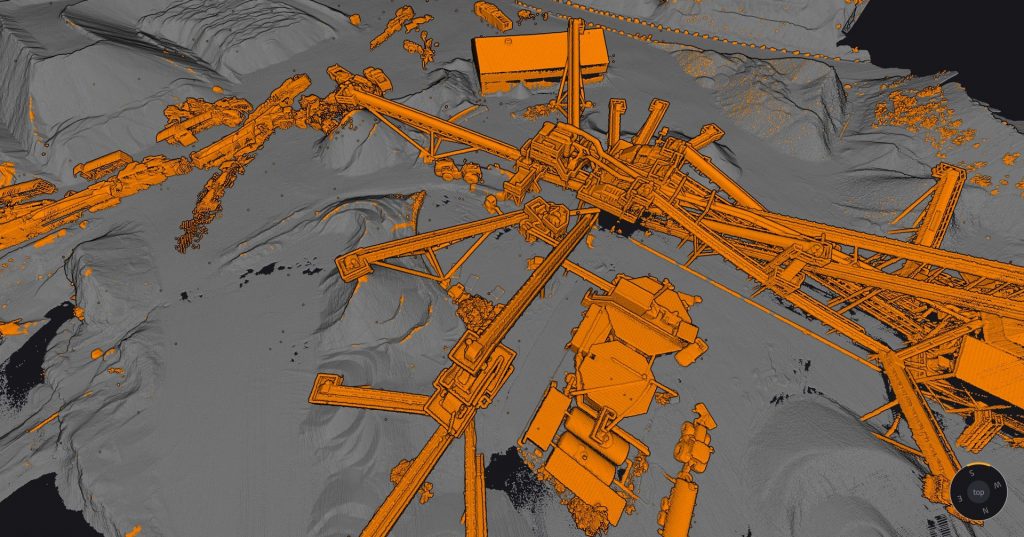
- 採掘LiDARは、採掘現場の詳細な地形調査、高解像度の標高データの取得、地形の微妙な変化の検出に使用されています;
- 建設エンジニアリングLiDARマッピングは、建設進捗モニタリング、衝突検出、現場分析のガイドとなる;
- 林業:エアボーンLiDARは汚染のモデリングや炭素吸収量の推定に使用されている;
- デジタル・シティ・モデリング:3D点群により、都市全体の3Dデジタルツインやバーチャルレプリカを作成できる。
LiDARスキャナーがさまざまな業界でどのように使用されているかについては、こちらの記事を参照。
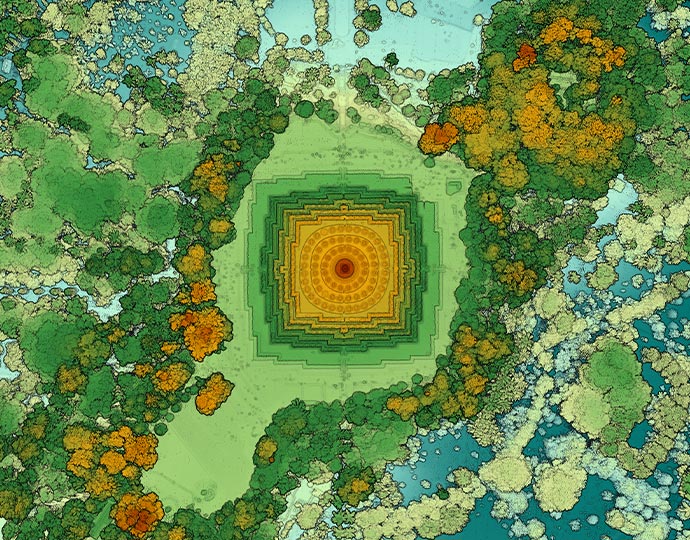
考古学プロジェクトの点群
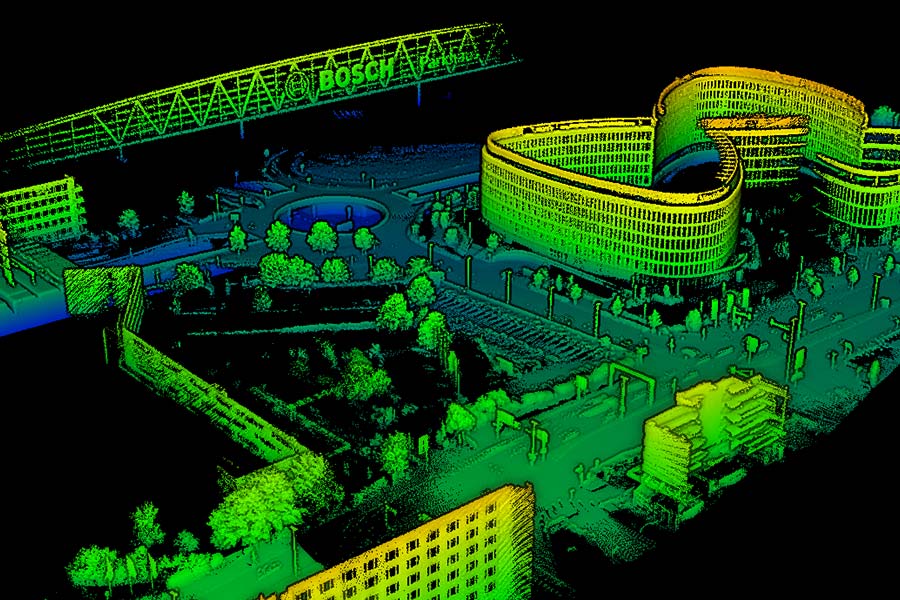
デジタル都市モデリング・プロジェクトのための点群
LiDARスキャナーの利点と限界
LiDARはしばしば写真測量やレーダーと比較される。 写真測量とLiDARは、3D点群データのジオデータ取得技術である。 LiDARがレーザーパルスを使ってスキャン装置付近の対象物までの距離を測定し、3D点群を作成するのに対し、写真測量は重ね合わせた画像を基礎としている。 レーダーは、回転または固定されたアンテナから送信される電波を使用し、反射された信号の飛行時間を測定する。
これらは、LiDARスキャナーが写真測量やレーダーと比較して優れている点です:
- LiDARスキャナーは3D点群を直接キャプチャするのに対し、写真測量は画像を3D点群に変換するための余分な中間ステップを必要とする;
- LiDARは外部光源を必要としないため、暗闇でも性能を発揮し、24時間365日データを取得できる;
- LiDARはレーダーよりも3Dマッピングに適している;
- LiDARは、植生のような複数のリターンがあるため、複雑で不規則な対象物に適している。
また、LiDARスキャナーには他の技術と比べて不利な点もある:
- LiDARスキャナーの欠点は、レーザービームが受信機に到達するまでに何度も反射する結果、距離計算に誤差が生じることである;
- オクルージョンとは、3D点群における隙間や影のことで、オブジェクトが他のオブジェクトの視界を遮ることを指す;
- LiDARのデータ量は非常に大きく、データ処理を行う際にハードウェアに多くの処理時間と計算能力を要求することがある。
レーザースキャニングと写真測量の違いについては、こちらの記事をご参照ください。 レーダーとLiDARの比較については、こちらの記事を参照されたい。
LiDARスキャナーの最新動向と将来展望
レーザースキャニング技術は、この25年間で大きな進歩を遂げた。 一般的に、LiDARスキャナーの使用は、技術の進歩と新しいアプリケーションの結果として成長すると予想される。 例えば、コンピュータの継続的なパワーアップに伴う機器の部品の小型化の進行は、レーザーセンサーがより高性能になると同時に、より小型・軽量になることを意味する。 コンピュータの能力が向上すれば、より多くの点群データを短時間で取得・処理できるようになり、LiDARパルスの戻りの波形全体を記録する全波形LiDARを使用するアプリケーションが増える。
より小型のシステムは、屋内と屋外の両方で、ドローンベースのLiDARの新しい用途を開く。 ポジショニングとオリエンテーションを目的とした同時定位マッピング(SLAM)アルゴリズムは、ドローンベースのLiDARを含む屋内レーザースキャニングを可能にする。 水域とその周辺を3Dで捉えるために、ドローンを使ったLiDARが現実のものとなった。 さらに、自動車分野ではLiDARを使用して、(半)自律的に自動車をナビゲートしながら、物体検出用のライブ高精細(HD)マップを作成している。
最後に、LiDARのもう1つのトレンドは、データ取得時の特徴分類と抽出に人工知能(AI)を採用することである。 つまり、点群の解釈は、この作業を迅速かつ良好な結果で行うように訓練されたアルゴリズムに任されている。
YellowScan CloudStationソフトウェア上でポイントを「地上/非地上」に自動分類

イエロースキャンナビゲーターはグリーンレーザーで水中を貫通する
結論
この記事では、LiDARスキャナーの仕組みについて説明する。 LiDARスキャナーは、正確で精密な3D点群を直接キャプチャするために使用されるアクティブセンサーで、さまざまな派生3D製品の基礎となる。 これらは、農業、鉱業、マッピング、エンジニアリング、考古学などの産業におけるさまざまな用途に使用されている。 LiDARスキャナーには、主に地上型と航空型の2種類がある。 LiDARスキャナーには、1秒間に多くのレーザーパルスを発信するレーザー光源、受信機、走査光学系が含まれている。 LiDARは、他の2つの3Dデータ取得ソースであるレーダーや写真測量と比較すると、いくつかの利点と欠点があります。 LiDARの未来は明るい。様々なユーザーシナリオにおけるLiDARスキャナーの使いやすさを増幅する技術的進歩の結果、より多くの産業アプリケーションが立ち上がるだろう。
リソース
「点群計測入門:レーザースキャニングと写真測量からの点群」Matthias Lemmens著(Whittles出版、2023年)
“画像とGIS:画像から情報を抽出するためのベストプラクティス」Kass Green、Russell G. Congalton、Mark Tukman著(Esri Press、2017年)
LiDARスキャナーに関するよくある質問
LiDARスキャナーとは?
LiDARまたはレーザー・スキャナーは、対象物に人が接触することなく対象物までの距離を測定するためのレーザー光線を発するアクティブ・センサである。 LiDARスキャナーには、主にエアボーン・スキャナーとテレストリアル・スキャナーの2種類がある。
LiDARスキャナーは何をするのですか?
LiDARスキャナーは、1回の測量で数百万から数十億の点からなる点群を日常的に取得する。 3Dレーザースキャニングは、3D都市モデリング、道路や鉄道の検査、その他多くの用途のためのジオデータ取得技術である。
LiDARスキャナーの仕組みは?
LiDARスキャナーには、高周波で個々のレーザーパルスまたはレーザービームを生成するレーザーユニットが含まれている。 リターンがスキャナによって登録された後、スキャナから対象物までの距離が測定される。 次に、測定データは複数の座標変換を経て、共通の座標系における3次元点に変換される。
最初のLiDARスキャナーを発明したのは?
最初の商用LiDARは、1962年にヒューズ研究所のセオドア・マイマンと彼のチームによって市場に投入された。
LiDARスキャナーとレーザースキャナーの違いは何ですか?
LiDARは、距離を測定するためのレーザー技術の使用を指すより広い用語であり、空中および地上のアプリケーションを含む様々な文脈で使用されている。 レーザースキャニングは、この概念をより狭く定義したもので、特に、多くの場合、地上装置を使用して、物体や環境の詳細な3D形状や幾何学的形状をキャプチャするプロセスを指す。