LiDARとRADARの比較

LiDAR(Light Detection And Ranging)とRADAR(Radio Detection And Ranging)の違いは、その波長です。
LiDARとRADARは、遠くの物体の存在や体積を検出するという基本的な目的は同じですが、この2つの技術の違いを理解することが重要です。
Light Detection and Ranging(LiDAR)は、光を利用したリモートセンシング技術です。 Yellowscanの場合、LiDARの考え方は非常にシンプルで、小さな赤外線レーザービームを表面に向け、レーザーが光源に戻るまでの時間を測定します。 360°の視野角を持つLiDAR(回転鏡などを使用)を用意することで、環境の点群を取得することが可能です。 そして、特定のソフトウェアによって、LiDARの周囲の形状を空間上の正確な位置で再現する3D画像を作成します。
RADARシステムの仕組みはLiDARとほぼ同じですが、大きな違いは、レーザーやLEDの光の代わりに電波を使うということです。 回転または固定されたアンテナから電波を発信し、反射した信号の飛行時間を測定する。
RADARの波長は30cm~3mmですが、LiDARはマイクロメートル領域の波長です(Yellowscan LiDARは903nmと905nmで動作します)。
LiDARとレーダーの違いとは?
レーダーはその波長により、遠距離の物体や霧や雲を通した物体を検出することができます。 しかし、その横方向の解像度は、アンテナの大きさによって制限されます。 一般的なレーダーの分解能は、100mの距離で数mです。
LiDARは、3Dマッピングの高精度を可能にするコンパクトなソリューションです。 100mの距離で、Yellowscan LiDARシステムの解像度は数センチメートルです。
そのため、LiDARはレーザー高度計や等高線地図に使用されています。 一方、レーダーは、航空機の衝突防止システム、航空管制、レーダー天文学などに利用されています。
レーダーデータ
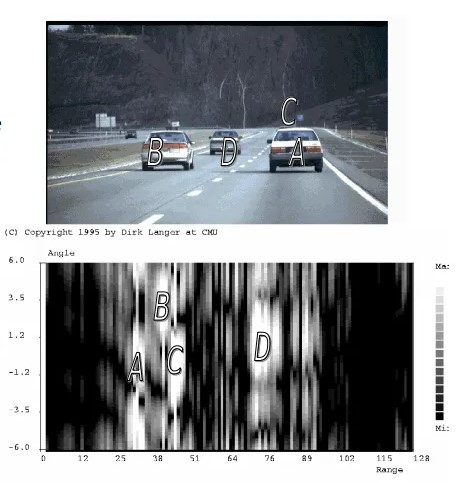
走査型レーダーからのデータ。 上の画像は現場の映像、下の画像はレーダーデータで、対応する位置が記されています。
明るさは戻りの強さを表します。 A車は近く、レーダーリターン中央(映像はレーダーほど右に広がっていない)、B車はさらに左、C車は少し離れていてAの屋根の上にかろうじて見える、D車はもっと離れていてAとBの間の方位にある。

LiDARデータ
Yellowscan UAS LiDARによるデータ。 画像は、日本のYellowscan Vx-20で、AGL80mのフライトから生成したポイントクラウドです。
トップ画像は、シェーディング効果(アイドームライティング)で高さ別に色分けしています。 配電線のような微細な物体も鮮明に識別します。
下の画像は、LiDARと同期したカメラから撮影したRGB値で着色しています。 LiDARの各ポイントには、オルソモザイクから取り出した色の値が割り当てられています。 レンダリングは、没入感のある3D画像です。
LiDARとレーダーの比較よくある質問
LiDARとレーダー技術の区別と用途に関するよくある質問をご覧ください:
LiDARとレーダーの主な違いは何ですか?
LiDARとレーダーの主な違いは、その基礎技術にある。 LiDARはレーザー光線を使って距離を測定し、レーダーは電波に頼る。 この根本的な違いが、用途や能力の違いにつながっている。
LiDARやレーダーは一般的にどこで、どのような目的で使用されているのか?
LiDARは、自律走行車、林業、考古学、土木工学、鉱業などの分野で使用されている。 正確な3Dマッピング、障害物検知、環境モニタリングなどに使用される。
レーダーは航空、軍事、天気予報、海上ナビゲーションで広く使われている。 物体を検知し、その速度と方向を測定するその能力は、これらの分野で非常に貴重なものとなっている。
LiDARとレーダー技術に共通点はありますか?
そう、共通点がある。 LiDARもレーダーも、物体の検出と測距に使われるリモートセンシング技術である。 その違いはあれど、さまざまな業界で欠かせないツールとなっている。
LiDARとレーダー、どちらの技術が特定の用途に適しているか?
LiDARとレーダーのどちらを選択するかは、特定のアプリケーションの要件に依存します。 LiDARは正確な3Dマッピングに優れ、レーダーは長距離の検知や悪天候に適している。 どの技術を使うかを決めるには、多くの場合、コスト、精度、環境条件などの要素を考慮する必要がある。 しかし、その精度は一般的にLiDARよりも低く、通常はメートル単位で測定される。
ソナー技術の仕組み、LiDARやレーダーとの違いは?
ソナー技術は、LiDARやレーダーとはまったく異なる原理で作動する。 レーダーのような電磁波やLiDARのようなレーザー光線を使う代わりに、ソナーは音波に頼っている。 ソナーシステムは、水中で音波を送受信するハイドロホンと呼ばれるセンサーで構成されている。 この音波が物体にぶつかるとセンサーに跳ね返り、物体の距離と方向を計算することができる。 要約すると、LiDARとレーダーが電磁波に基づいているのに対し、ソナーは音波を使って水中の物体を検出する。
自律走行車のビジョン・センサーは、運転の安全性と技術をどのように向上させるのか?
カメラ、LiDAR、レーダー、超音波センサーを含む自律走行車のビジョンセンサーは、より安全で効率的な運転のために不可欠である。 これらのセンサーは、車両の周囲に関するデータを取得し、AIシステムが物体、歩行者、道路状況を認識して対応できるようにする。 テスラや他の自律走行車メーカーはこれらの技術を使用しており、今後も開発を続け、より安全で高度な自律走行ソリューションに貢献していくだろう。
結論
要約すると、LiDARとレーダーの比較は、これら2つのセンシング手法の基本的な技術的格差を補強するものである。 LiDARはレーザーパルスを照射し、それが跳ね返ってくるまでの時間を測定することで作動し、正確な距離と詳細な3D地図を提供する。 一方、レーダーは電波を利用して物体を検知し、その速度と距離を測定するもので、長距離の検知や悪天候に優れている。
これらの技術的な違いが、LiDARとレーダーのそれぞれの用途と強みを決定している。 LiDARは綿密なマッピングや物体認識を必要とする作業に適しているが、レーダーは様々な環境条件下での信頼性が高いため、航空や海上作戦などの分野では不可欠である。 このような技術的なニュアンスを理解することは、特定の用途に最も適したセンシング方法を選択し、最適な性能と成果を確保するための鍵となる。
ドローンによるLiDARマッピングに興味がありますか? UAVのLiDARについて知っておくべきことの全記事を読む
N.B:著者レア・ムッシー。 この記事の内容は、著作権により保護されています.