Comprendre les scanners LiDAR

Les scanners LiDAR sont utilisés pour capturer des nuages de points en 3D. Mais comment fonctionnent-ils ? L’article ci-dessous explique, entre autres, le principe de fonctionnement des différents scanners LiDAR et la manière dont les mesures de distance sont transformées et combinées en nuages de points 3D. Ceux-ci constituent la base de nombreux produits de cartographie 3D utilisés pour différentes applications industrielles.
Introduction aux scanners LiDAR
La technologie LiDAR est une acquisition de géodonnées qui a fait des progrès significatifs au cours des 25 dernières années. Les scanners LiDAR capturent des nuages de points 3D, à partir desquels d’autres produits 3D sont dérivés. Il s’agit notamment de modèles urbains en 3D, de réseaux triangulaires irréguliers (TIN), de paysages virtuels en 3D, de modèles numériques d’élévation (DEM), etc. Ils sont utilisés pour de nombreuses applications telles que la prévention des inondations, l’amélioration de la sécurité routière, l’analyse environnementale et bien d’autres encore.
Un scanner LiDAR est un appareil qui acquiert régulièrement des nuages de points comprenant des millions, voire des milliards de points au cours d’un seul relevé. Les scanners LiDAR sont des capteurs « actifs » qui émettent des faisceaux laser pour mesurer les distances par rapport à des objets sans contact humain avec ces derniers ; « actif » signifie que les capteurs eux-mêmes émettent de l’énergie électromagnétique. Pour plus d’informations sur les différentes classifications et sur la place du LiDAR, consultez cet article.
Principaux types de scanners LiDAR
Il existe deux principaux types de scanners LiDAR : les scanners aéroportés et les scanners terrestres. Les scanners LiDAR aéroportés utilisent un dispositif laser monté dans un avion qui mesure le temps de parcours des impulsions laser dans les deux sens. Au cours des dernières années, les drones se sont révélés être une technologie fiable pour la capture de géodonnées en 3D. YellowScan est spécialisée dans les systèmes LiDAR pour drones. Pour plus d’informations sur l’utilisation du LiDAR sur les drones, consultez cet article.
Le LiDAR statique au sol utilise un scanner LiDAR qui reste dans une position fixe et stationnaire pendant le projet de numérisation. Lorsqu’un instrument de balayage utilise une plate-forme mobile au sol, on parle de « balayage laser mobile ».
Les termes scanner LiDAR et scanner laser sont souvent utilisés de manière interchangeable, mais il existe une différence subtile entre les deux : LiDAR est un terme plus large qui fait référence à l’utilisation de la technologie laser pour mesurer les distances et qui est utilisé dans différents contextes, y compris les applications aériennes et terrestres. Le terme « balayage laser » fait souvent référence au processus de capture de formes et de géométries 3D détaillées d’objets ou d’environnements, généralement à l’aide d’un équipement terrestre. Le terme LiDAR est donc plus large que celui de balayage laser, qui pourrait également être appelé « LiDAR terrestre ».

Scanner LiDAR aéroporté

Scanner LiDAR terrestre
Composants d’un scanner LiDAR
Les scanners LiDAR combinent une optique de balayage, un émetteur d’impulsions laser et un récepteur. Un capteur laser aéroporté se compose d’un émetteur d’impulsions laser, d’une optique de balayage pour diriger et distribuer les impulsions laser sur la trajectoire de vol et d’un récepteur. Un système de balayage combine trois composants : un scanner LiDAR, un système de positionnement basé sur le système mondial de navigation par satellite (GNSS) et un système de navigation inertielle (INS). Un INS est également connu sous le nom de « unité de mesure inertielle » (IMU), qui permet de déterminer l’orientation du capteur par rapport à un système de référence.
La source laser d’un scanner LiDAR transmet de nombreuses impulsions laser par seconde ; l’optique de balayage sert à diriger et à distribuer le laser sur une trajectoire de vol (dans le cas d’un système LiDAR aéroporté). Dans le cas du balayage laser terrestre, des miroirs rotatifs répartissent les faisceaux laser sur une scène de manière régulière et contrôlée.
Principe de fonctionnement des scanners LiDAR
L’unité laser d’un scanner LiDAR produit des impulsions laser individuelles ou des faisceaux laser à haute fréquence. Pour capturer une scène, les faisceaux laser doivent être distribués dans deux directions, plus ou moins perpendiculaires l’une à l’autre. Pour le balayage laser terrestre, il s’agit généralement des directions horizontale et verticale. Le LiDAR aéroporté fonctionne de la même manière que le LiDAR terrestre, mais il est plus exigeant car de multiples paramètres de l’orientation extérieure doivent être déterminés pendant que le système se déplace dans l’air. Pour plus d’informations sur le fonctionnement du LiDAR, consultez cet article.
Le faisceau laser émis par un scanner LiDAR mesure la distance par rapport à un objet que le faisceau rencontre en premier. Outre la portée, le scanner LiDAR enregistre des données supplémentaires, notamment l’angle vertical et l’angle horizontal de la portée. Les coordonnées sphériques 3D sont liées au système de coordonnées du dispositif de balayage laser.
De multiples transformations sont appliquées pour passer des coordonnées sphériques aux coordonnées cartésiennes 3D X, Y et Z liées au scanner laser, et enfin à un système de coordonnées commun pour le géoréférencement de plusieurs nuages de points. Le relevé d’une scène nécessite généralement des balayages à partir de différentes positions pour couvrir de grands objets. Les logiciels de traitement des nuages de points permettent de générer des modèles numériques d’élévation et de créer des modèles 3D (cartes 3D) de scènes extérieures et intérieures.
Applications des scanners LiDAR
Les scanners LiDAR sont utilisés pour diverses applications dans tous les secteurs, y compris mais sans s’y limiter :
- Archéologie: Le LiDAR est utilisé pour reconstruire des structures anciennes, découvrir des motifs complexes et des indices sur les civilisations d’autrefois ;
- Exploitation minière: Le LiDAR est utilisé pour effectuer des levés topographiques détaillés des sites miniers, capturer des données d’élévation à haute résolution et détecter les changements de terrain les plus subtils ;
- Ingénierie de la construction: La cartographie LiDAR guide le suivi de l’avancement de la construction, la détection des collisions et l’analyse du site ;
- Foresterie: le LiDAR aéroporté est utilisé pour la modélisation de la pollution et pour aider à l’estimation de l’absorption du carbone ;
- Modélisation numérique des villes: Les nuages de points 3D permettent de créer des jumeaux numériques 3D ou des répliques virtuelles de villes entières.
Pour plus d’informations sur l’utilisation des scanners LiDAR dans de nombreux secteurs, consultez cet article.
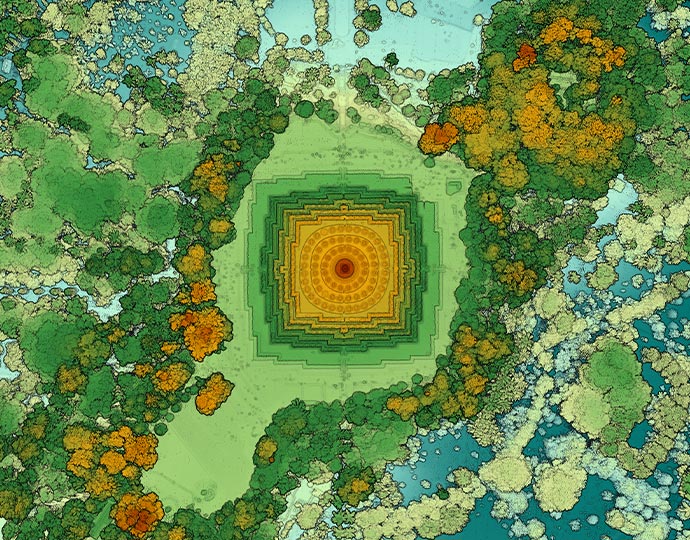
Nuage de points d’un projet archéologique
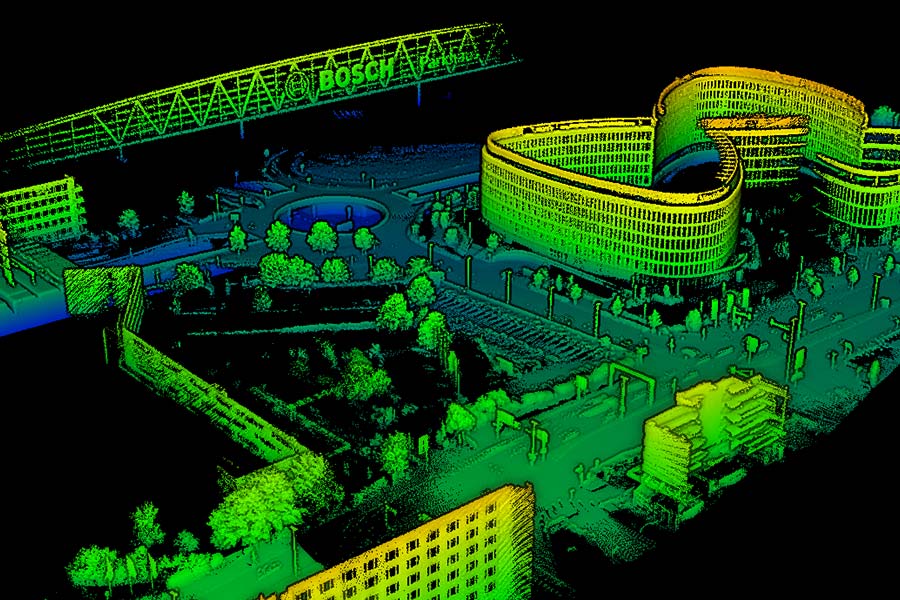
Nuage de points pour un projet de modélisation numérique de la ville
Avantages et limites des scanners LiDAR
Le LiDAR est souvent comparé à la photogrammétrie et au radar. La photogrammétrie et le LiDAR sont des technologies d’acquisition de géodonnées pour les nuages de points 3D. Mais leur méthodologie pour capturer et créer des nuages de points en 3D est différente : alors que le LiDAR utilise des impulsions laser pour mesurer la distance d’un objet à proximité du dispositif de balayage afin de créer des nuages de points en 3D, la photogrammétrie utilise des images qui se chevauchent comme base pour ce faire. Le radar utilise des ondes radio émises par une antenne fixe ou rotative et mesure le temps de vol du signal réfléchi.
Ce sont là quelques-uns des avantages des scanners LiDAR par rapport à la photogrammétrie, qui est une autre technologie d’acquisition de nuages de points en 3D, ainsi qu’au radar :
- Les scanners LiDAR capturent directement des nuages de points 3D, alors que la photogrammétrie nécessite une étape intermédiaire supplémentaire pour transformer l’imagerie en nuages de points 3D ;
- Le LiDAR fonctionne bien dans l’obscurité car il ne nécessite pas de source de lumière externe, ce qui signifie que les données peuvent être capturées 24 heures sur 24 et 7 jours sur 7 ;
- Le LiDAR se prête mieux à la cartographie en 3D que le radar, en raison de sa meilleure résolution sur une grande distance ;
- LiDAR est bien adapté aux objets complexes et irréguliers en raison des retours multiples, tels que la végétation.
Les scanners LiDAR présentent également des inconvénients par rapport à d’autres technologies :
- L’un des inconvénients des scanners LiDAR réside dans les erreurs de calcul de la distance, dues à la réflexion multiple des faisceaux laser avant d’atteindre le récepteur ;
- Les occlusions désignent les lacunes ou les ombres dans les nuages de points 3D lorsque des objets bloquent la vue d’autres personnes ;
- Les volumes de données LiDAR sont très importants, ce qui peut nécessiter beaucoup de temps de traitement et de puissance de calcul de la part du matériel lors du traitement des données.
Pour plus d’informations sur les différences entre le balayage laser et la photogrammétrie, consultez cet article. Pour une comparaison entre le radar et le LiDAR, reportez-vous à cet article.
Tendances émergentes et perspectives d’avenir des scanners LiDAR
La technologie du balayage laser a beaucoup progressé au cours des 25 dernières années. D’une manière générale, l’utilisation des scanners LiDAR devrait augmenter en raison des progrès technologiques et des nouvelles applications. Par exemple, la miniaturisation continue des composants des appareils, accompagnée d’une augmentation constante de la puissance des ordinateurs, signifie que les capteurs laser acquièrent de plus en plus de capacités tout en devenant plus petits et plus légers. L’augmentation de la puissance des ordinateurs signifie que davantage de données de nuages de points sont capturées et traitées en moins de temps, ce qui ouvre la voie à davantage d’applications utilisant le LiDAR à onde complète, qui enregistre la forme d’onde complète du retour d’une impulsion LiDAR au lieu des trois à cinq pics discrets du LiDAR à retour discret.
Les systèmes plus petits ouvrent la voie à de nouvelles applications pour le LiDAR par drone, tant à l’intérieur qu’à l’extérieur. Les algorithmes de localisation et de cartographie simultanées (SLAM) à des fins de positionnement et d’orientation permettent le balayage laser en intérieur, y compris le LiDAR par drone. Pour capturer les plans d’eau et les zones environnantes en 3D, le LiDAR par drone est désormais une réalité. En outre, le secteur automobile utilise le LiDAR pour produire des cartes haute définition (HD) en direct pour la détection d’objets lors de la navigation (semi-)autonome de la voiture.
Enfin, une autre tendance dans le domaine du LiDAR est l’adoption de l’intelligence artificielle (IA) pour la classification et l’extraction des caractéristiques au moment de la capture des données. Cela signifie que l’interprétation des nuages de points est laissée aux algorithmes, qui sont formés pour effectuer ce travail rapidement et avec de bons résultats.
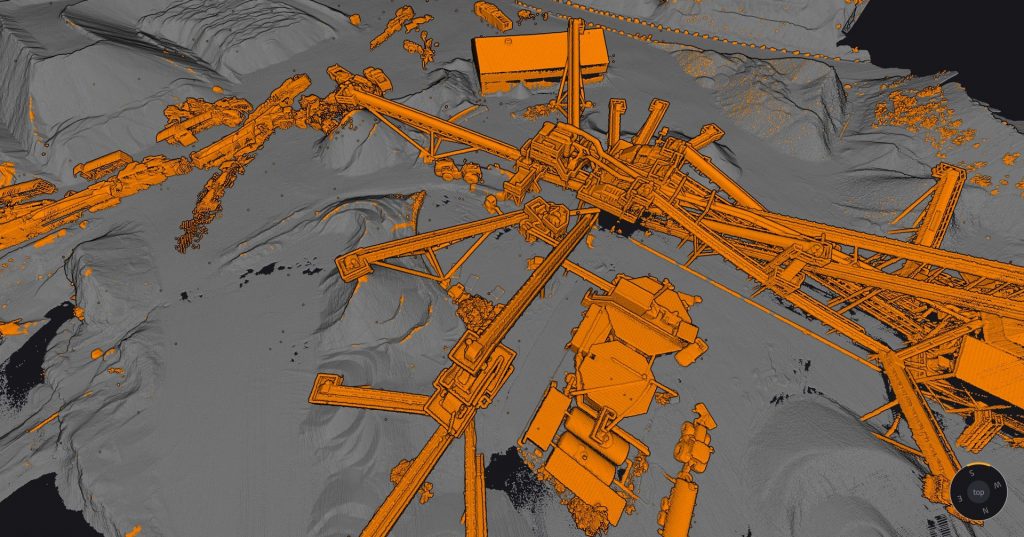
Classification automatique des points comme « sol/non-sol » sur le logiciel YellowScan CloudStation

Le YellowScan Navigator utilise un laser vert pour pénétrer dans l’eau.
Conclusion
Cet article décrit le fonctionnement des scanners LiDAR. Les scanners LiDAR sont des capteurs actifs utilisés pour capturer directement des nuages de points 3D précis et exacts, qui constituent la base de différents produits 3D dérivés. Ils sont utilisés pour différentes applications dans des secteurs tels que l’agriculture, l’exploitation minière, la cartographie, l’ingénierie et l’archéologie. Il existe deux principaux types de scanners LiDAR : les scanners LiDAR terrestres et les scanners LiDAR aériens. Les scanners LiDAR contiennent une source laser qui émet de nombreuses impulsions laser par seconde, un récepteur et une optique de balayage. Le LiDAR présente plusieurs avantages et inconvénients par rapport au radar et à la photogrammétrie, deux autres sources d’acquisition de données 3D. L’avenir du LiDAR s’annonce prometteur, avec le lancement d’un plus grand nombre d’applications industrielles grâce aux avancées technologiques qui amplifient l’utilisation des scanners LiDAR dans différents scénarios d’utilisation.
Ressources :
« Introduction à la Pointcloudmetry : Nuages de points issus du balayage laser et de la photogrammétrie », par Matthias Lemmens (Whittles Publishing, 2023)
« Imagerie et SIG : Best Practices for Extracting Information from Imagery », par Kass Green, Russell G. Congalton et Mark Tukman (Esri Press, 2017).
Questions fréquemment posées sur le scanner LiDAR
Qu'est-ce qu'un scanner LiDAR ?
Les LiDAR ou scanners laser sont des capteurs actifs qui émettent des faisceaux laser pour mesurer les distances entre des objets sans contact humain avec ces derniers ; le terme « actif » signifie que les capteurs eux-mêmes émettent de l’énergie électromagnétique. Il existe deux principaux types de scanners LiDAR : les scanners aéroportés et les scanners terrestres.
Que fait un scanner LiDAR ?
Un scanner LiDAR acquiert régulièrement des nuages de points composés de millions, voire de milliards de points au cours d’un seul relevé. Le balayage laser 3D est une technologie d’acquisition de géodonnées pour la modélisation de villes en 3D, l’inspection de routes, de voies ferrées et une multitude d’autres applications.
Comment fonctionnent les scanners LiDAR ?
Un scanner LiDAR contient une unité laser qui produit des impulsions laser individuelles ou des faisceaux laser à haute fréquence. La distance entre le scanner et l’objet cible est mesurée après l’enregistrement d’un retour par le scanner. Ensuite, les données de mesure sont converties en un point 3D dans un système de coordonnées commun par le biais de multiples transformations de coordonnées.
Qui a inventé le premier scanner LiDAR ?
Le premier LiDAR commercial a été mis sur le marché en 1962 par Theodore Maiman et son équipe du Hughes Research Laboratory.
Quelle est la différence entre un scanner LiDAR et un scanner laser ?
LiDAR est un terme plus large qui fait référence à l’utilisation de la technologie laser pour mesurer les distances et qui est utilisé dans différents contextes, y compris les applications aériennes et terrestres. Le balayage laser est une définition plus étroite de ce concept et se réfère spécifiquement au processus de capture de formes et de géométries 3D détaillées d’objets ou d’environnements, souvent à l’aide d’un équipement terrestre.