Détection de l’empiètement des arbustes dans les prairies semi-naturelles à l’aide de UAS LiDAR

Interview :
Bonjour Bjarke, merci d’avoir accepté cette interview ! Nous savons que vous avez utilisé YellowScan Surveyor pour vos travaux de recherche sur la biodiversité. Pouvez-vous nous parler un peu plus de vous et de vos travaux de recherche ?
Je m’appelle Bjarke Madsen et je travaille à l’université d’Aarhus au Danemark. Je suis étudiant en doctorat depuis 3,5 ans à Ecoinformatics and Biodiversity, Department of Biology. Ici, je travaille avec le groupe Vegetation dynamics @Vegdyn, et dans le laboratoire UAS4Ecology, @UAS4Ecology.
Mes travaux de recherche portent sur la compréhension de la dynamique de la diversité des prairies à l’aide de la télédétection par drone. Je participe à la surveillance de la biodiversité en développant des méthodes efficaces de conduite, de traitement et d’analyse des données de télédétection par drone. J’essaie de détecter les différents éléments de la diversité végétale à travers le temps et l’espace.
Nous avons utilisé YellowScan Surveyor dans la première partie de ma thèse « Detecting shrub encroachment in seminatural grasslands using UAS LiDAR » en collaboration avec Urs A. Treier, András Zlinsky, Arko Lucieer et Signe Normand.
Comment avez-vous utilisé UAS LiDAR pour détecter les arbustes ?
Le YellowScan Surveyor UAS LiDAR a été utilisé pour scanner une prairie où des chevaux et des vaches ont été récemment réintroduits dans le cadre d’une expérience de ré-ensauvagement. Nous avons détecté et surveillé une espèce d’arbuste spécifique (Cytisus scoparius ou genêt à balais) qui pose problème dans certaines zones en termes d’empiètement. L’espèce a une croissance rapide et est capable de supplanter les plantes environnantes en monopolisant la lumière, ce qui peut avoir des conséquences négatives sur la diversité des plantes. Nous avons donc scanné la zone et classé les arbustes dans le nuage de points LiDAR de l’UAS. Nous avons développé un ensemble de variables 3D caractérisant et distinguant cette espèce des autres arbustes. Les variables ont été ciblées pour détecter les caractéristiques morphologiques variant entre les espèces d’arbustes afin de représenter, par exemple, la disposition des feuilles et des branches. Par exemple, notre arbuste focal (C. scoparius) a une forme de croissance moins dense que, par exemple, Juniperus communis, qui peut donc être séparé par les variables ponctuelles représentant la pénétration de la lumière et la complexité.
Nous avons utilisé nos connaissances écologiques pour créer différentes variables représentant au mieux les caractéristiques de croissance des arbustes, puis nous avons utilisé une technique d’apprentissage automatique basée sur les points pour classer les différentes espèces directement dans le nuage de points 3D. Nous avons atteint une précision d’au moins 86 % dans notre modèle de classification. Cette grande précision nous a permis de calculer la biomasse de notre arbuste focal et de projeter ces mesures sur l’ensemble du paysage de 6,7 ha.

MikroKopter MK8-3500 UAS et YellowScan Surveyor dans la zone étudiée – Crédit photo. Bjarke Madsen.

Paysage sauvage avec des arbustes et des arbres – Crédit photo. Bjarke Madsen.
Quels ont été les premiers résultats ?
Nous avons réalisé deux campagnes de vol à l’automne 2017 et au printemps 2018 au-dessus de la même zone. Cela nous a permis d’étudier les changements au cours de la saison hivernale, car on suppose que les animaux affectent davantage la végétation ligneuse au cours de cette période, alors qu’en même temps, on ne s’attend pas à une croissance importante des plantes au cours de cette saison froide. En moyenne, nous avons constaté, comme prévu, une diminution de la biomasse entre l’automne et le printemps, même si elle est faible (33,4 ou 4,9 g/m2, selon le modèle de classification). Toutefois, la modification de la biomasse arbustive n’a pas été répartie de manière égale sur l’ensemble de la zone. Dans certaines zones, nous avons constaté une forte diminution de la biomasse arbustive, en particulier dans une zone plus proche de la forêt.
Nous n’avons pas encore pris le temps d’étudier davantage les facteurs sous-jacents à cette diminution de la biomasse. Cependant, une hypothèse est que les animaux ont tendance à passer plus de temps dans la forêt pendant l’hiver et qu’ils affectent donc davantage les arbustes dans cette zone en les piétinant et en les broutant. Mais, comme nous l’avons dit, d’autres recherches seront nécessaires pour vérifier cette hypothèse. D’autre part, nous avons également observé des zones avec une légère augmentation de la biomasse arbustive, peut-être due à une croissance printanière précoce ou à des périodes plus chaudes pendant l’hiver.

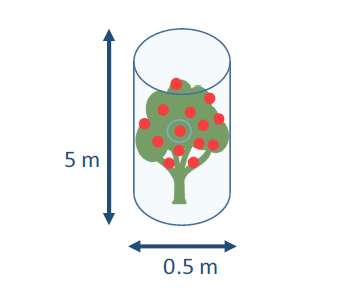
Cytisus Scoparius
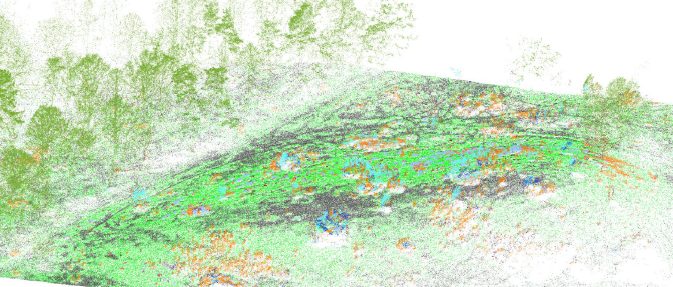
Nuage de points LiDAR classifié – Cytisus Scoparius
Madsen, Bjarke, et al. « Détection de l’empiètement des arbustes dans les prairies semi-naturelles à l’aide de UAS LiDAR ». Écologie et évolution (2020)
Qu’en est-il de l’acquisition des données : zone étudiée et nombre de vols ?
En octobre 2017, nous avons effectué l’un de nos premiers vols avec le YellowScan Surveyor. Nous n’avons pas cherché à couvrir le plus de terrain possible, mais nous avons mis l’accent sur le niveau de détail nécessaire pour détecter les variations à petite échelle de la végétation des prairies. Nous avons collecté des données LiDAR en 3 vols, ce qui est gérable en une demi-journée. Nous avons volé relativement bas, à 40 mètres au-dessus du sol. Avec ces paramètres, nous avons pu cartographier une zone de 6,7 hectares.

Au cours de l’année écoulée, nous avons bien établi le flux de travail et les routines et nous sommes familiarisés avec le processus. Mon collègue Urs A. Treier est le pilote de l’UAS, il s’occupe de la partie technique lourde et j’ai été le copilote de tous les vols, je me suis occupé des plans de vol et j’ai surveillé la station de contrôle au sol.
Actuellement, nous effectuons une surveillance temporelle plus détaillée en répétant les vols UAS tous les deux mois. Les données ainsi acquises nous permettront d’étudier plus en détail les changements de croissance saisonniers ainsi que les effets des stades phénologiques sur les classifications LiDAR.
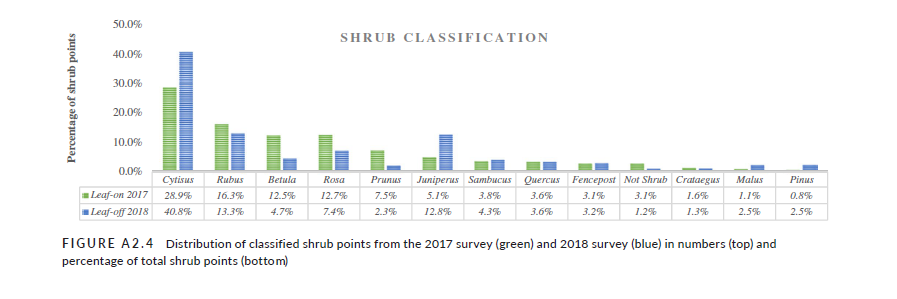
Distribution des points d’arbustes classés de l’enquête de 2017 (vert) et de l’enquête de 2018 (bleu) en pourcentage du total des points d’arbustes. Madsen, Bjarke, et al. « Détection de l’empiètement des arbustes dans les prairies semi-naturelles à l’aide de UAS LiDAR ». Écologie et évolution (2020)
Qu’en est-il du traitement des données de pointcloud ? Quels sont les résultats finaux en termes de précision ?
Une fois le nuage de points LiDAR généré avec le logiciel YellowScan, la manipulation du nuage de points a été effectuée avec le logiciel OPALS, développé par les chercheurs de l’Université de Vienne. Nous avons utilisé OPALS pour une classification semi-automatique basée sur les points directement dans le nuage de points, ce qui signifie que chaque point peut se voir attribuer diverses caractéristiques supplémentaires. Deux éléments majeurs étaient nécessaires pour que la classification fonctionne.
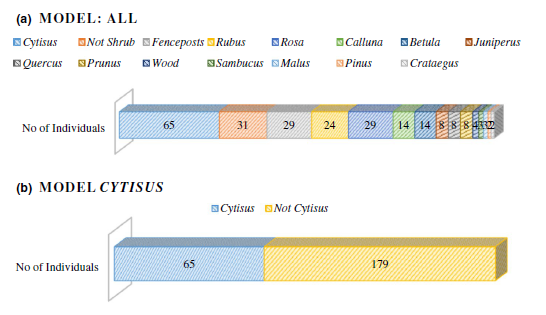
Tout d’abord, les données de référence et de validation de 180 observations de 11 espèces d’arbustes différentes ont été échantillonnées manuellement dans la zone en mesurant les emplacements exacts à l’aide d’un système GNSS.
Ensuite, des variables de nuages de points ont pu être extraites pour les arbustes désormais étiquetés. Ensuite, nous avons appliqué une approche d’apprentissage automatique en utilisant un algorithme de partitionnement récursif pour classer chaque point du nuage de points sur la base des caractéristiques morphologiques représentées par les variables LiDAR.
La précision globale de la classification des nuages de points était bonne, avec des précisions globales de 86,9 % et 95,2 % pour les données d’automne et de printemps, respectivement. Nous avons procédé à quelques ajustements pour aligner les nuages de points provenant des trois vols différents afin de combiner les données et d’obtenir une meilleure représentation des arbustes. Les résultats sont excellents. Nous sommes toujours bien en dessous de 10 cm de précision absolue, ce qui est notre exigence.
Comment décririez-vous votre expérience des solutions YellowScan ?
Lorsque nous avons acheté le système, nous recherchions une solution clé en main prête à l’emploi et c’est ce que nous avons obtenu ! En outre, le Surveyor fait bien son travail et il est facile de travailler avec les logiciels POSPac et YellowScan. Pour être honnête, je ne me souviens pas de problèmes majeurs et j’ai post-traité pas mal de données LiDAR !
L’équipe de recherche a l’impression que, même avec deux retours (ou échos) fournis par le géomètre, nous obtenons un grand nombre de points et une bonne représentation de la végétation. Nos données semblent très bonnes et précises et nous ne voyons pas beaucoup de bruit dans les sorties de données. Bien entendu, nous étudions les caractéristiques de la végétation à une échelle très fine et n’appliquons pas le système à la sylviculture.
Quelque chose à ajouter sur la cartographie LiDAR par UAS pour détecter la végétation ?
Nous voulions voir ce qui est réellement possible en termes de résolution spatiale pour les études sur la diversité des plantes. Travailler sur la biodiversité des prairies est une question de précision et d’exactitude. Grâce à la technologie UAS LiDAR, nous avons pu constater les différences entre les paysages.
Nous utilisons le LiDAR sur des drones parce que la plupart des activités traditionnelles de gestion des terres sont basées sur des échelles de parcelles locales. Cela ne représente pas nécessairement ce qui se passe dans l’ensemble du paysage. C’est ce que nous avons montré dans notre étude. En ce sens, nous avons pu observer différentes tendances : variation de la biomasse à travers une zone avec des augmentations et des diminutions. Nous n’aurions pas été en mesure de saisir une telle dynamique de la végétation à l’échelle du paysage sans le système LiDAR de l’UAS. Désormais, nous pouvons couvrir une plus grande zone pour surveiller la biodiversité, ce qui contribuera à la gestion de la nature et aux efforts de conservation.
Merci d’avoir partagé cet aperçu et le résultat de votre travail de recherche. Bonne chance pour la soutenance de votre thèse !
NB : Auteur Julien BO.
