Étude LiDAR : Modélisation des couloirs d’avalanche – YellowScan

Défi
Cette mission a été lancée en réponse à une demande de la Direction Départementale des Territoires, qui ne disposait pas d’équipement LiDAR et qui a donc externalisé l’ensemble du processus de capture de données à des sociétés de drones.
L’objectif était d’effectuer une modélisation complète de quatre couloirs d’avalanche dans les Pyrénées, couvrant une superficie totale de 430 hectares (1 060 acres) grâce à une étude LiDAR.
Ces domaines font l’objet de mises à jour régulières afin d’en garantir l’exactitude et la pertinence. Leur principale exigence était d’utiliser un système LiDAR intégré à un M300 RTK, permettant un relevé efficace et rapide du terrain montagneux avec ses caractéristiques difficiles, telles que des pentes abruptes, des paysages accidentés et des zones densément boisées. Le levé s’est étendu sur 2,3 kilomètres (1,4 miles) et a présenté une différence d’altitude maximale de 1000 mètres (environ 3300 pieds), ce qui a constitué la section la plus difficile du projet.
Solution
Pour répondre à ces exigences, Instadrone a été chargé de collecter des données LiDAR à l’aide de son système LiDAR YellowScan Explorer.
Les principaux objectifs consistaient à atteindre une densité minimale de 8 points au sol par mètre carré (hors eau et bâtiments) dans les zones fortement boisées, le tout dans un délai très court. En outre, la précision (1) du nuage de points était essentielle, la cible étant de 5 cm.
En outre, l’étude visait à obtenir une précision (2) du nuage de points de 10 cm.
Une première mission a été entreprise à l’aide d’un capteur DJI L1, mais elle n’a pas permis d’obtenir les résultats escomptés en raison de divers problèmes rencontrés lors de la capture des données et du post-traitement.

Etude du couloir d’avalanche dans les Pyrénées françaises
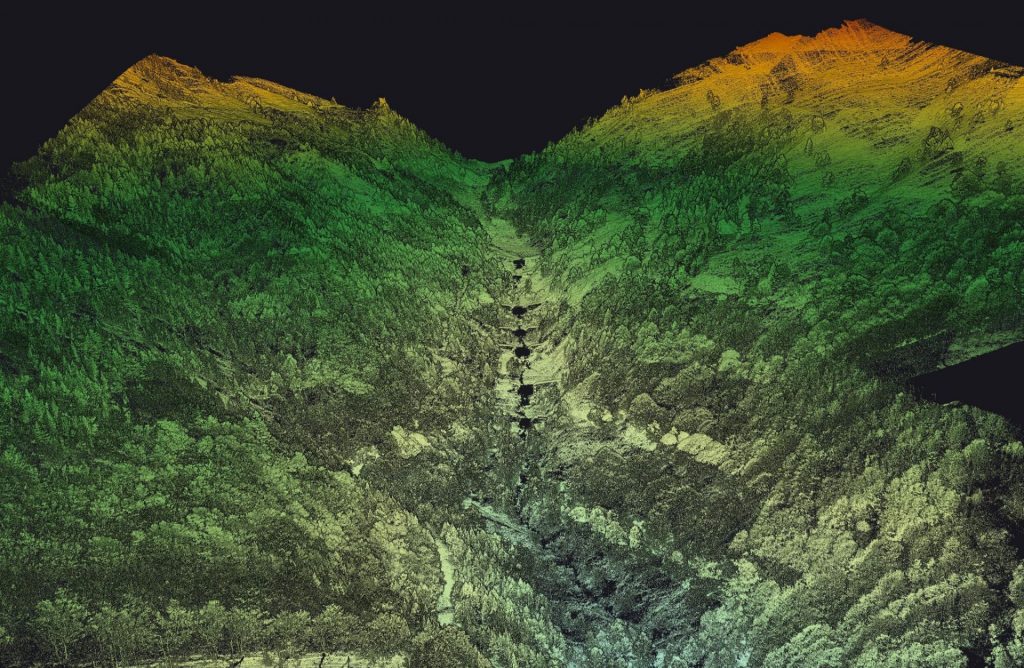
Nuage de points de la zone d’étude avec végétation de feuillus et de conifères
Paramètres de la mission
- Taille de l’enquête: 4 zones totalisant 430 ha. (1 060 ac.)
- Durée de l’enquête :
- Une demi-journée pour la préparation du vol – décision sur la vitesse, l’altitude, la double grille ou non, le point de décollage, le placement des GCP, l’emplacement du pivot de secours pour le point de référence de l’IGN, etc.
- Environ 6 heures de vol
- Traitement : 1 jour pour POSPac + YellowScan CloudStation, suivi d’une semaine complète consacrée à la classification sol/surface dans un logiciel tiers.
- Nombre de vols :
- 7 vols : 3 vols pour la plus grande zone (176 ha./435 ac.), 2 vols pour 148 ha. (366 acres), et les deux vols restants pour deux zones plus petites.
- Vitesse et altitude :
- Vitesse de 5 m/s à une hauteur de 120 m AGL.
- Équipement :
- Système LiDAR YellowScan Explorer.
- Drone M300 RTK.
- Récepteur GNSS Trimble R4S + réseau CORS pour le contrôle.
- Logiciel POSPac.
- YellowScan CloudStation avec module de réglage des bandes.
- Pas de caméra – nuage de points non coloré.

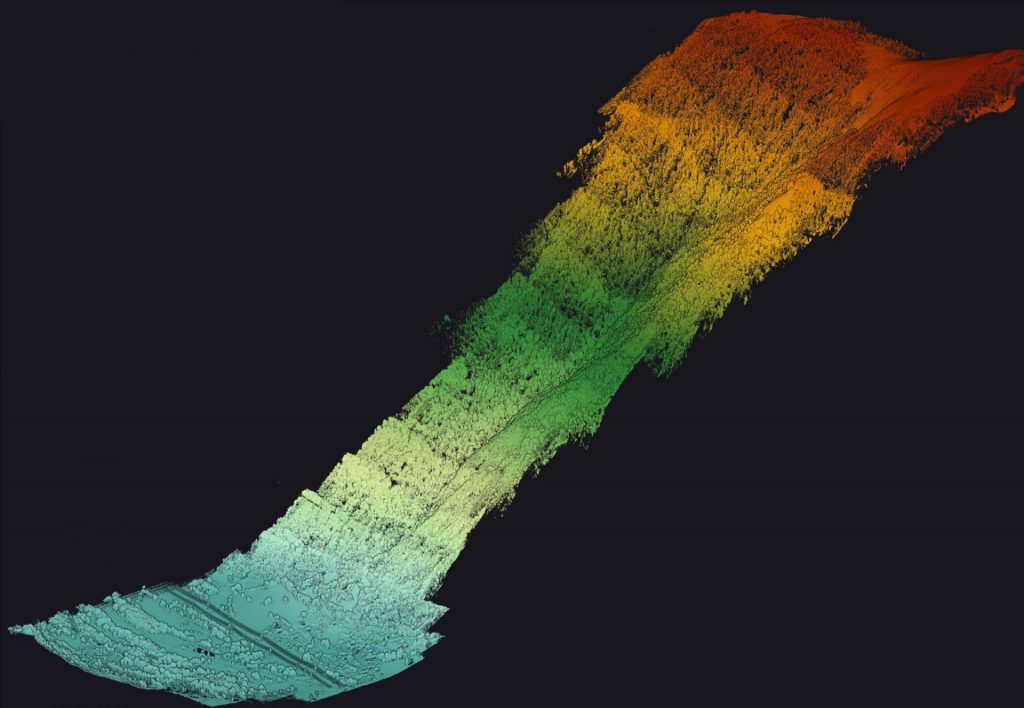
Tranche verticale du nuage de points avec des données MNT très précises.
Résultats
-
Densité de points : minimum 100 points par mètre carré (en fonction de la présence ou non d’arbres).
-
Précision : entre 5 et 10 cm XYZ
Instadrone a indiqué que la densité de points obtenue avec le système LiDAR YellowScan Explorer était nettement supérieure à la solution DJI L1, que ce soit sur des surfaces végétalisées ou non. En outre, Instadrone a obtenu un nuage de points de meilleure qualité et a satisfait aux exigences de précision et d’exactitude.
En outre, la mise en œuvre de la fonction d’ajustement des bandes dans YellowScan CloudStation a amélioré la cohérence globale entre chaque ligne de vol, ce qui a permis d’obtenir un résultat de modélisation plus précis.
Le YellowScan Explorer a facilement traité l’ensemble de l’étude avec plus de 400 m (1300 pieds) de dénivelé.
Leur client a été extrêmement satisfait du résultat.
Depuis ce projet, Instadrone n’a pratiquement utilisé que les solutions LiDAR de YellowScan. Tout d’abord, parce qu’il offre un niveau de confiance accru dans l’obtention de données fiables, contrairement au système L1 qui produisait souvent des fichiers corrompus ou incomplets sans explications claires. Instadrone a ajouté que l’intégration de POSPac dans la YellowScan CloudStation permet une gestion transparente du post-traitement, offrant une grande flexibilité dans l’utilisation d’un point de référence pivot ou IGN/CORS. Ils ont également mentionné que les solutions LiDAR de YellowScan fournissent systématiquement des nuages de points denses et de haute qualité, dépassant les capacités du système L1, quelle que soit la présence de végétation. Ces performances accrues garantissent non seulement des résultats précis, mais simplifient également les tâches de classification ultérieures.
L’utilisation des systèmes LiDAR de YellowScan pour différents projets présente de nombreux avantages :
- un nuage de points de meilleure qualité
- Densité de points suffisante, même dans les zones à végétation dense.
- Confort accru pour les pilotes grâce à une acquisition plus rapide des données, permettant des vols à des altitudes de 120 mètres (390 pieds) et à des vitesses de 10 m/s.
- Le post-traitement de YellowScan a permis un contrôle complet de la génération de nuages de points à l’aide de POSPac.
- La combinaison du LiDAR et des drones a permis de réduire les risques pour l’homme, en particulier sur les terrains difficiles caractérisés par une topographie accidentée et des pentes raides.
L’assistance fournie par YellowScan était facilement accessible en cas de problèmes majeurs. L’équipe d’assistance est toujours attentive, donne des explications claires et est toujours disponible lorsque nous rencontrons des problèmes, que ce soit par téléphone, par TeamViewer ou par courrier électronique.

1/ Précision: Dans les levés LiDAR, la précision correspond à l’écart-type de la distance moyenne entre les points et du plan moyen formé. Combinée à l’évaluation de la non-concordance (distances planes entre les bandes), elle peut donner une bonne estimation du bruit global du nuage de points, souvent considéré à tort comme de la précision.
2/ La précision dans ce contexte mesure la distance entre un point du nuage acquis et son point correspondant dans le nuage de référence, fournissant une évaluation de la cohérence globale de l’enquête par rapport à une référence donnée. Une autre façon de mesurer la précision serait d’utiliser des GCP.
