Inspección LiDAR de corredores de avalanchas en Pirineos

Desafío
Esta misión se inició en respuesta a una petición de la Dirección Departamental de Territorios, que carecía de equipos LiDAR y, por tanto, subcontrató todo el proceso de captura de datos a empresas de drones.
El objetivo era realizar una modelización exhaustiva de cuatro corredores de aludes en los Pirineos, que cubrían una superficie total de 430 hectáreas (1 060 ac.) mediante un estudio LiDAR.
Estas áreas se actualizan periódicamente para garantizar su exactitud y pertinencia. Su principal requisito era utilizar un sistema LiDAR integrado con un M300 RTK, que permitiera una topografía eficiente y rápida del terreno montañoso con sus características desafiantes, como pendientes pronunciadas, paisajes escarpados y zonas densamente boscosas. La prospección abarcó 2,3 kilómetros y presentó un desnivel máximo de 1.000 metros, lo que supuso el mayor reto del proyecto.
Solución
Para cumplir estos requisitos, se encargó a Instadrone la recogida de datos LiDAR con su sistema YellowScan Explorer LiDAR.
Entre los objetivos principales figuraba lograr una densidad mínima de puntos de tierra de 8 puntos por metro cuadrado (excluidos el agua y los edificios) en zonas muy boscosas, todo ello dentro de un plazo ajustado. Además, la precisión (1) de la nube de puntos era esencial, siendo el objetivo de 5 cm.
Además, el estudio pretendía lograr una precisión (2) de la nube de puntos dentro de los 10 cm.
Se llevó a cabo una misión inicial utilizando un sensor DJI L1; sin embargo, no se lograron los resultados deseados debido a diversos problemas encontrados durante la captura de datos y el postprocesamiento.

Estudio del corredor de avalanchas en los Pirineos franceses
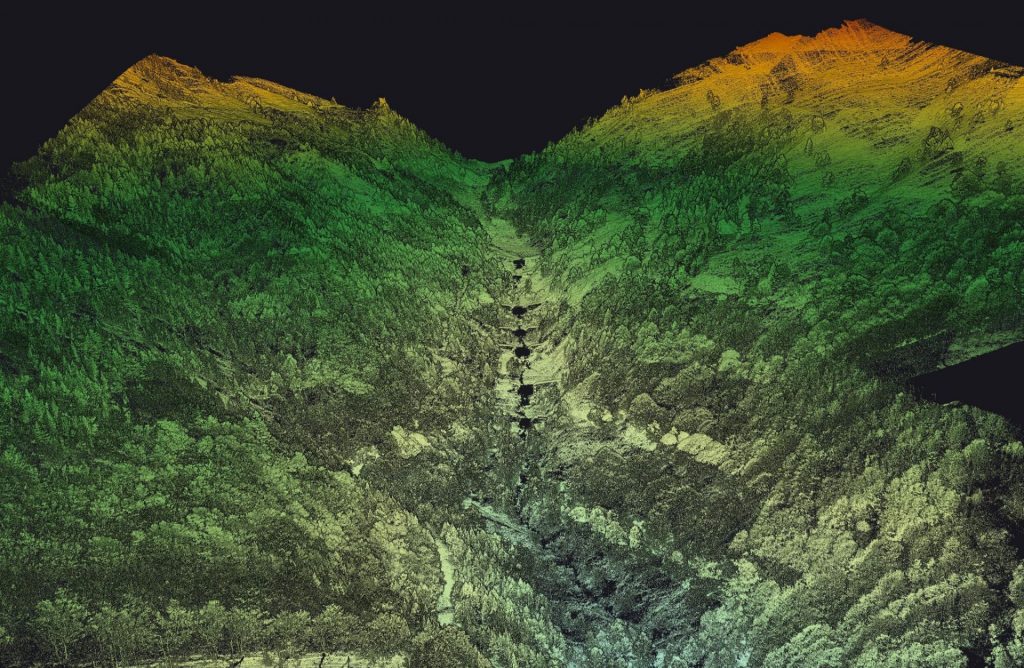
Nube de puntos de la zona de estudio con vegetación caducifolia y de coníferas
Parámetros de la misión
- Tamaño de la encuesta: 4 zonas con un total de 430 ha. (1 060 ac.)
- Duración:
- Medio día para la preparación del vuelo: toma de decisiones sobre velocidad, altitud, cuadrícula doble o no, punto de despegue, colocación del GCP, ubicación del pivote de reserva para el punto de referencia del IGN, etc.
- Aproximadamente 6 horas de vuelo
- Procesamiento: 1 día para POSPac + YellowScan CloudStation, seguido de una semana completa de tiempo dedicado a la clasificación del terreno/superficie en software de terceros.
- Número de vuelos:
- 7 vuelos: 3 vuelos para la zona más grande (176 ha./435 ac.), 2 vuelos para 148 ha. (366 ac.), y los 2 vuelos restantes para dos zonas más pequeñas.
- Velocidad y altitud:
- Velocidad de 5 m/s a una altura de 120 m AGL.
- Equipamiento:
- Sistema LiDAR YellowScan Explorer.
- Dron M300 RTK.
- Receptor GNSS Trimble R4S + red CORS para el control.
- Software POSPac.
- YellowScan CloudStation con módulo de ajuste de banda.
- Sin cámara – nube de puntos sin colorear.

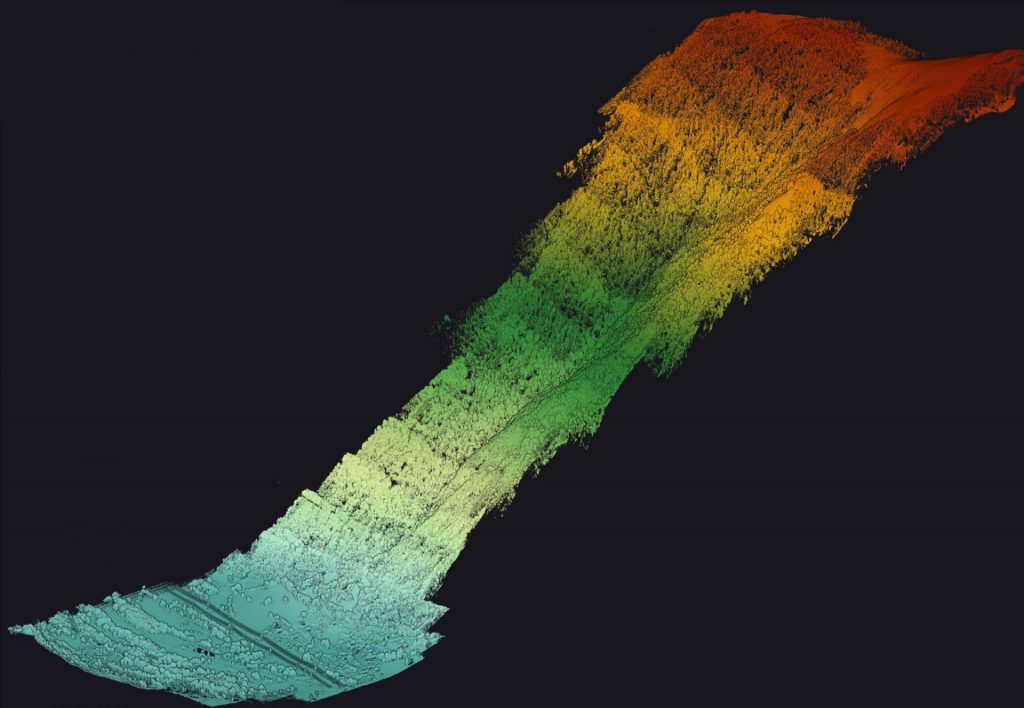
Corte vertical de la nube de puntos con datos MDT de alta precisión.
Resultados
-
Densidad de puntos: mínimo 100 pts por metro cuadrado (dependiendo de si está bajo árboles o no)
-
Precisión: entre 5 y 10 cm XYZ
Instadrone informó de que la densidad de puntos conseguida con el sistema YellowScan Explorer LiDAR era notablemente superior a la solución DJI L1, tanto en superficies con vegetación como sin ella. Además, Instadrone obtuvo una nube de puntos de mayor calidad y cumplió con éxito los requisitos de precisión y exactitud.
Además, la implementación de la función Strip Adjustment en YellowScan CloudStation mejoró la coherencia general entre cada línea de vuelo, lo que condujo a un resultado de modelado más preciso.
El YellowScan Explorer realizó sin problemas el levantamiento completo con más de 400 m de desnivel.
Su cliente quedó muy satisfecho con el resultado.
Desde este proyecto, Instadrone ha utilizado casi exclusivamente soluciones LiDAR de YellowScan. En primer lugar, porque ofrece un mayor nivel de confianza en la obtención de datos fiables, a diferencia del sistema L1, que a menudo producía ficheros corruptos o incompletos sin explicaciones claras. Instadrone añadió que la integración de POSPac dentro de YellowScan CloudStation permite una gestión de postprocesamiento sin fisuras, permitiendo flexibilidad en la utilización de un punto de referencia pivotante o IGN/CORS. También mencionaron que las soluciones YellowScan LiDAR proporcionan constantemente nubes de puntos densas y de alta calidad, superando las capacidades del sistema L1, independientemente de la presencia de vegetación. Este rendimiento mejorado no sólo garantiza resultados precisos, sino que también simplifica las tareas de clasificación posteriores.
El uso de los sistemas YellowScan LiDAR para diferentes proyectos puede reportar muchas ventajas:
- una nube de puntos de mayor calidad
- Densidad de puntos suficiente incluso en zonas de vegetación densa.
- Mayor comodidad para los pilotos gracias a una adquisición de datos más rápida, que permite vuelos a altitudes de 120 metros y velocidades de 10 m/s.
- El postprocesamiento de YellowScan permitió un control total de la generación de nubes de puntos mediante POSPac.
- La combinación de LiDAR y drones redujo los riesgos humanos, sobre todo en terrenos difíciles caracterizados por una topografía accidentada y pendientes pronunciadas.
La asistencia proporcionada por YellowScan estuvo disponible en caso de problemas importantes. El equipo de soporte es siempre atento, da explicaciones claras y está siempre disponible cuando tenemos algún problema, ya sea a través de llamadas telefónicas, TeamViewer o correo electrónico.

1/ Precisión: En los levantamientos LiDAR, la precisión se refiere a la desviación estándar de la distancia media entre puntos y el plano medio formado. Combinado con la evaluación del desajuste (distancias plano a plano entre bandas), puede dar una buena estimación del ruido global de la nube de puntos, a menudo considerado erróneamente como precisión.
2/ En este contexto, la precisión mide la distancia entre un punto de la nube adquirida y su punto correspondiente en la nube de referencia, lo que proporciona una evaluación de la coherencia global de la encuesta con respecto a una referencia determinada. Otra forma de medir la precisión sería utilizar PCG.
