Detección del riesgo de avalanchas: Norwegian Public Roads Administration y Norges teknisk-naturvitenskapelige universitet (NTNU)

La administración noruega de carreteras públicas Statens vegvesen y la Universidad Noruega de Ciencia y Tecnología (NTNU) organizaron una prueba de concepto en octubre de 2021 para reunir a varios organismos gubernamentales con el fin de evaluar el uso de la última tecnología LiDAR y de drones para ayudar en la vigilancia del riesgo de avalanchas. Habían elegido los alrededores de la emblemática carretera de Trollstigen, en Noruega, por tener montañas escarpadas y cobertura de nieve todo el año en la montaña. Los socios de YellowScan, Scandinavian Drone y Orbiton, junto con el apoyo del equipo de asistencia de YellowScan, respondieron a la llamada para participar en este evento.
¿Cuál es el reto?
El objetivo de este acto era triple. En primer lugar, se trataba de identificar y mostrar las capacidades de la combinación dron/LiDAR para cartografiar los riesgos de avalancha en las carreteras en el entorno real de las montañas. En segundo lugar, recopilar datos/mapas de nubes de puntos de las zonas de prueba para compararlos con los conjuntos de datos existentes tomados con métodos tradicionales de topografía aérea en otro momento. Por último, querían crear una referencia general de la tecnología LiDAR disponible para drones.
El evento se dividió en 3 misiones diferentes voladas a lo largo de 2 días. El sitio A fue diseñado para ser el más fácil de volar y permitirá a los vendedores recoger datos LiDAR en circunstancias ideales. El emplazamiento B se diseñó para reproducir la recogida de datos LiDAR en condiciones operativas realistas en un terreno escarpado y montañoso por encima de una carretera. Por último, el lugar C se diseñó como un lugar difícil, con nieve, para reproducir una situación en la que la NPRA necesita recoger información de un lugar escarpado a una distancia considerable por encima de una carretera.

Preparativos para el lanzamiento de la misión © Scandinavian Drone
Solución
El equipo pilotaba un helicóptero teledirigido VelosV3 que Orbiton había personalizado y «norueguizado» para resistir las difíciles condiciones meteorológicas noruegas. Montaron el YellowScan Vx20-300 integrando un Riegl miniVUX 3 con un APX20 de Applanix, una de las soluciones LiDAR totalmente integradas más precisas que ofrece YellowScan.
Volar a través de ráfagas de viento de +20 m/s para cartografiar +600 m de verticalidad de acantilados fue, cuando menos, un reto. Tras completar las misiones, utilizaron la solución de software YellowScan CloudStation. CloudStation permite extraer, procesar y visualizar datos de nubes de puntos inmediatamente después del vuelo de adquisición. La autogeneración de tiras y la producción de archivos LAS pueden realizarse fácilmente con unos pocos clics.
Parámetros de la misión
Dada la naturaleza del evento, las 3 misiones tenían parámetros diferentes, aquí está cada conjunto para los sitios A, B y C.Sitio A :
- <8min de vuelo, 3 tiras extraídas
- 60mAGL, 5m/s 4 ha de cobertura sobre campo, casa y bosque
- Toma de imágenes a 300 kHz, 120 grados FOV
- Procesado con estación base, a 6 km
- Cobertura de satélites = 19 de media
Sitio B :
- 28min de vuelo, 26 tiras extraídas
- 690mAGL, 8m/s, vuelo nivelado a lo largo del acantilado
- Cobertura de acantilados de 360 m
- Tomas a 200KHz, 180deg FOV
- Procesado con estación base, a 8 km
- Cobertura de satélites = 14 de media
Sitio C :
- Dividida en dos subzonas (C1 y C2)
- C1 era una zona de fácil acceso con nieve
- C2 era un glaciar de difícil acceso con nieve
- 20min de vuelo, 3 tiras extraídas
- 790mAGL, 8m/s
- Cobertura de nieve fresca 12ha
- Tomas a 200KHz, 180deg FOV
- Procesado con estación base, a 8 km
- Cobertura de satélites = 19 de media

Fotografía del emplazamiento C © Scandinavian Drone

Fotografía del emplazamiento C © Scandinavian Drone
Dado que los demás participantes optaron por la zona C1, más fácil, o por no volar en absoluto, la única esperanza de recopilar datos sobre la C2 quedó en manos de nuestro equipo. Tras una cuidadosa planificación de la misión y una evaluación de las condiciones, se abrió una ventana a última hora de la tarde del último día. El e-cóptero Velos fue enviado en un largo ascenso para llegar a la zona de interés real, que era un campo de nieve situado aproximadamente a 2 km de distancia horizontal y 700 m de distancia vertical desde el punto de despegue. Se podía sentir la emoción de la multitud mientras el dron seguía subiendo y finalmente alcanzaba la zona C2 y empezaba a recoger datos en el área de interés.
Estaba claro que el entorno era duro, ya que se notaba cómo el viento no paraba de soplar nieve sobre la cresta de la montaña por encima del glaciar. En pleno vuelo, debido a las malas condiciones meteorológicas, la misión fue abortada por exceso de turbulencias y se vio obligada a regresar al punto de despegue. No obstante, el equipo pudo procesar tiras utilizables para el sitio C2. Tras el aterrizaje, los espectadores de la NPRA, la NTNU y otros celebraron en voz baja el vuelo y agradecieron al equipo de Orbiton su esfuerzo y su hábil vuelo.
Esta prueba de concepto de la NTNU fue una oportunidad única para adquirir experiencia y valiosas lecciones sobre los requisitos de la recogida de datos LiDAR en entornos difíciles, y quedamos muy impresionados con el rendimiento de los sistemas. Como había otros participantes, también pudimos conocer a colegas del sector y ver otros sistemas en acción. Nuestra mayor conclusión es que, aunque se puede llegar lejos con sistemas básicos, hay una línea clara que marca la necesidad de sistemas de gama alta. Y una cosa que se aplica en todos los casos sería que una solución que sea fiable y fácil de usar como un sistema YellowScan, siempre será clave para llevar a cabo una misión con éxito.

Martin Andersson
Consejero Delegado – Scandinavian Drone
Resultados
La Administración de Carreteras Públicas de Noruega y la Universidad Noruega de Ciencia y Tecnología se mostraron satisfechas con el evento, ya que les brindó una buena oportunidad de ver sobre el terreno soluciones tanto de drones como de LiDAR, en diversas condiciones. Nuestro equipo demostró que puede superar el reto de volar en misiones de apoyo al esfuerzo en curso para hacer que la detección del riesgo de avalanchas sea más predecible y menos reaccionaria como lo ha sido en el pasado.
El equipo Scandinavian Drone/Orbiton/YellowScan sólo pudo recoger datos de alta calidad en las zonas más difíciles (B y C2), donde los demás participantes no intentaron realizar los vuelos.
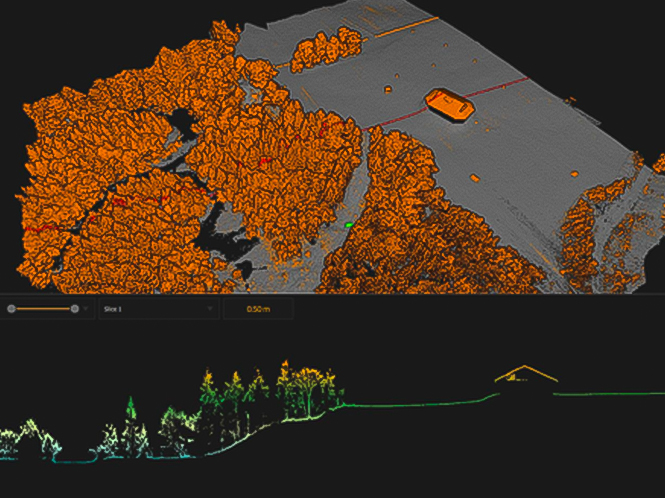
Nube de puntos del emplazamiento A © Scandinavian Drone
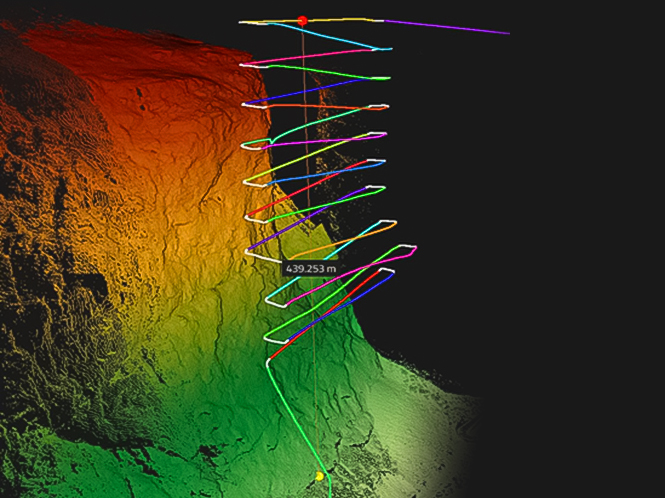
Nube de puntos del emplazamiento B © Scandinavian Drone
Principales ventajas de YellowScan Vx20-300
- Utiliza el escáner Riegl miniVUX-3UAV
- Nube de puntos de alta precisión
- El largo alcance le permite mantener una distancia segura de la ladera de la montaña con una turbulencia del viento reducida
- Longitud de onda adecuada para la nieve
- Valor de intensidad calibrado
- Máxima precisión
- Integración con drones multirrotor
